Examen de TD nį2 2007-2008
![]()
![]()
Le cas ťchťant, on n'oubliera pas de fournir quelques commentaires sur les techniques employťes.
Question 1: Lancer de rayons
On considŤre une sphŤre S de rayon r centrťe sur la position (cx, cy, cz). On considŤre la position d'un point d'incidence P de coordonnťes (x, y, z) sur cette sphŤre. Dťfinir sans l'implanter une mťthode de calcul de la normale extťrieure ŗ la sphŤre S au point P.
Question 2: Courbes paramťtriques cubiques et surfaces paramťtriques bicubiques
On considŤre la fonction de prototype suivant : position *calculBSpline(position *pts, matriceDeBase m, int n); dťveloppťe en TD/TP pour calculer la position de n points uniformťment rťpartis (dans l'intervalle [0.0, 1.0]) sur la courbe paramťtrique cubique de matrice de base m et de points de contrŰle pts (pts est un tableau de 4 position).
typedef struct position {
double x;
double y;
double z;
double t; } position;
typedef double matriceDeBase[4][4];
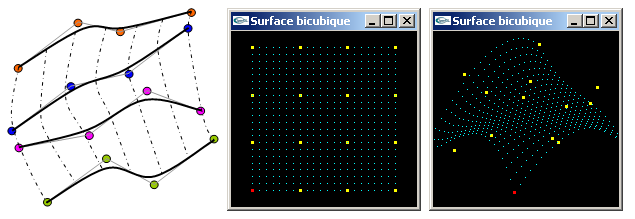
On va utiliser cette fonction pour gťnťrer n*n sommets de dťfinition d'une " surface paramťtrique bicubique " ŗ partir d'un maillage de 4 jeux de 4 points de contrŰle (4 quadruplets) soit au total 16 points de contrŰle. Chacun des quadruplets est utilisť pour gťnťrer une courbe cubique dťfinie sur n sommets. Les 4 jeux de n sommets ainsi obtenus sont utilisťs pour dťfinir n jeux de 4 points de contrŰle (lignes continues courbes sur le schťma ci-dessous) de maniŤre ŗ autoriser la gťnťration de n courbes cubiques de n sommets (lignes courbes en pointillť sur le schťma ci-dessous). On obtient ainsi n*n sommets dťfinissant une surface paramťtrique bicubique.
Ecrire une fonction respectant le prototype position **calculSurfaceBSpline(position **pts, matriceDeBase m, int n); calculant les n*n sommets d’une surface paramťtrique bicubique selon la mťthode dťfinie ci-dessus (pts est un tableau de 4x4 position).
Question 3: Camťra en OpenGL
Ecrire la fonction reshape d'un programme C + OpenGL + GLUT qui configure une camťra de visualisation en perspective selon les caractťristiques suivantes:
- Elle est placťe en position (100.0, 50.0, 50.0).
- Elle est dirigťe vers le point de coordonnťes (-100.0, -50.0, -200.0).
- La direction de la verticale est la direction x.
- Le ratio d'ouverture de la camťra est ajustť au ratio de la fenÍtre de visualisation.
- L'ouverture horizontale est de 30.0 degrťs.
- Les plans de clipping near et far sont respectivement aux distances (en -z) 235.0 et 435.0 de la camťra.
Question 4: LumiŤres en OpenGL
Ecrire une fonction C + OpenGL permettant d'activer et de paramťtrer les trois premiŤres lumiŤres dťfinissable en OpenGL selon les caractťristiques suivantes:
- PremiŤre lumiŤre
- Type lumiŤre ponctuelle
- Position : (10.0, 5.0, 10.0)
- Couleur en lumiŤre diffuse : rouge
- Couleur en lumiŤre spťculaire : vert
- Couleur en lumiŤre ambiante : noir
- DeuxiŤme lumiŤre
- Type lumiŤre directionnelle
- Direction du vecteur ťclairage : (1.0, 0.0, -1.0)
- Couleur en lumiŤre diffuse : bleu
- Couleur en lumiŤre spťculaire : jaune
- Couleur en lumiŤre ambiante : noir
- TroisiŤme lumiŤre
- Type spot
- Position : (10.0, 2.0, 10.0)
- Direction du cŰne d'ťclairage : (-1.0, 0.0, -1.0)
- Ouverture du cŰne d'ťclairage : 20.0į
- Pas d'attťnuation centre vers bord
- Couleur en lumiŤre diffuse : cyan
- Couleur en lumiŤre spťculaire : magenta
- Couleur en lumiŤre ambiante : gris ŗ 25%
Question 5: Mathťmatiques matricielles
On considŤre la suite de transformations gťomťtriques consistant chronologiquement en
- une rotation R1 d'angle ax autour de l'axe Ox
- une translation T1 de vecteur (dx1, dy1, dz1)
- une translation T2 de vecteur (dx2, dy2, dz2)
- une rotation R2 d'angle ay autour de l'axe Oy
Calculer la matrice de transformation en coordonnťes homogŤnes reprťsentative de cette suite de 4 transformations.
![]()
Remarques, erreurs
nicolas.janey@univ-fcomte.fr