L'illumination globale :
la radiositť
FACTEUR
DE FORME
HťmisphŤre
Hťmicube
Introduction
Les algorithmes de rendu par Z-Buffer+Lambert+Gourond+Phong ou par ray-tracing sont assez approximatifs en terme d'ťvaluation des dťplacements
d'ťnergie ŗ l'intťrieur des scŤnes.
Or, ce sont ces dťplacements d'ťnergie qui ont pour consťquence l'ťclairage et donc la coloration des objets.
Le principal problŤme non rťsolu est liť ŗ la localitť des ťclairages : Un objet n'est ťclairť que s'il n'est pas situť au delŗ d'un certain nombre de rťflexions (rťflexion diffuse, rťflexion spťculaire ou rťfraction) vis ŗ vis de toutes les sources lumineuses dťfinies "en tant que telles" dans la scŤne.
Tous les objets d'une scŤne sont de mÍme nature, qu'il s'agisse de lumiŤres ou bien d'objets graphiques classiques.
Ils ťmettent tous de l'ťnergie sous la forme de radiations ťlectromagnťtiques. Ce phťnomŤne les rend colorťs, donc visibles mais aussi lumineux
et donc ŗ mÍme d'ťclairer les autres objets.
Ce spectre d'ťmission (la radiositť) est la somme de deux composantes (chacune pouvant ťventuellement Ítre nulle) :
- une ťnergie ťmise intrinsŤquement,
- une ťnergie ťmise par rťťmission d'une partie des radiations reÁues en provenance des autres objets prťsents dans la scŤne.
Ainsi, aprŤs une infinitť (un trŤs grand nombre) de rťťmissions successives des objets les uns sur les autres, un ťquilibre ťnergťtique s’ťtablit ŗ l’intťrieur de la scŤne.
Chaque objet de la scŤne est alors affectť d’une composante lumineuse colorťe. C'est cette couleur que nous voyons.
-
Discrťtisation de la scŤne en un ensemble de n surfaces.
-
Calcul, pour chaque couple de surfaces, de la fraction d’ťnergie qui, ťmise par la premiŤre, sera rťceptionnťe par la seconde (facteur de forme).
-
Constitution d’un systŤme de n ťquations linťaires ŗ n inconnues oý les n inconnues sont les radiositťs ťmises par chaque facette.
-
Rťsolution de ce systŤme d’ťquations linťaires.
-
Affichage final par un algorithme classique d’ťlimination des parties cachťes (Z-Buffer ou lancer de rayons).
Calcul du facteur de forme entre deux surfaces
Le facteur de forme Fij est la fraction d’ťnergie qui quittant la facette i est reÁue par la facette j.
Pour le calcul de Fij, on tient compte des forme et orientation respectives des deux facettes ainsi que de la prťsence ťventuelle d’obstacles entre les deux.
|
Facteur de forme d'une surface vis ŗ vis d'une surface |
|
|
|
Touches de curseur et/ou souris pour manipuler le schťma |
Le facteur de forme dFdidj d’une surface diffťrentielle dAi vers une surface diffťrentielle dAj est :
oý qi est l’angle entre la normale ŗ la surface Ai au point considťrť et l’axe dAidAj, r est la longueur de cet axe et H est la valeur de la visibilitť (0 ou 1) de dAj depuis dAi.
Cette dťfinition diffťrentielle doit Ítre intťgrťe sur les deux surfaces Ai et Aj pour trouver la valeur recherchťe.
C’est ŗ dire :
ProblŤme : Rťaliser cette intťgration (qui est en fait une intťgrale quadruple (surface-surface)).
Il n'existe pas de mťthode analytique pour opťrer cette intťgration (mÍme dans les cas les plus simples)
-> On emploie des solutions approximťes.
PremiŤre approximation
On considŤre que Fij = Fdi j.
Calcul de Fdi j par projection sur l’hťmisphŤre
Une estimation de Fdi j est effectuťe en projetant toutes les portions de Aj visibles depuis dAi sur l'hťmisphŤre de rayon unitaire centrťe sur dAi et dont la base est parallŤle ŗ dAi.
On projette la portion de l'hťmisphŤre ainsi dťfinie sur le cercle base de l’hťmisphŤre selon l’axe donnť par la normale ŗ Ai.
On divise l’aire de la surface obtenue par l’aire du cercle base.
|
Mťthode de l'hťmisphŤre pour le calcul des facteurs de forme |
|
|
|
Touches de curseur et/ou souris pour manipuler le schťma |
Cette mťthode a pour inconvťnient de requťrir l’emploi d'un opťrateur de projection sur une sphŤre. Cette opťration est complexe et couteuse en temps. De plus, elle ne rťsoud pas le problŤme de la dťtermination des portions visibles.
Calcul de Fdi j par projection sur l’hťmicube
Principe : Projeter sur l’hťmicube supťrieur de centre dAi.
Chacune des cinq faces de l'hťmicube est discrťtisťe en un certain nombre de cellules carrťes identiques. On calcule quelles sont les cellules qui font partie de la surface projetťe.
|
Mťthode de l'hťmicube pour le calcul des facteurs de forme |
|
|
|
+/- pour augmenter/diminuer la discrťtisation de l'hťmicube a, A, b, B, c et C pour dťplacer la facette j Espace pour changer de facette j Touches de curseur et/ou souris pour manipuler le schťma |
A chacune de ces cellules est associť un facteur de forme approximť
oý qp est l’angle entre la normale ŗ la cellule p et le vecteur entre dAi et p, r est la distance
entre dAi et p, et DA est la surface d’une cellule.
La somme des facteurs de forme ťlťmentaires donne le facteur de forme total de la surface de dťpart.
On ťtablit que pour une cellule p de coordonnťes (xp,yp,zp) situťe sur l’hťmicube :
-
 si p est une cellule situťe sur la face supťrieure de l’hťmicube.
si p est une cellule situťe sur la face supťrieure de l’hťmicube. -
 si p est une cellule situťe sur l’une des 2 faces perpendiculaires ŗ l’axe x.
si p est une cellule situťe sur l’une des 2 faces perpendiculaires ŗ l’axe x. -
 si p est une cellule situťe sur l’une des 2 faces perpendiculaires ŗ l’axe y.
si p est une cellule situťe sur l’une des 2 faces perpendiculaires ŗ l’axe y.
|
Mťthode de l'hťmicube pour le calcul des facteurs de forme Valeurs des facteurs de forme ťlťmentaires des cellules de l'hťmicube |
|
|
|
+/- pour augmenter/diminuer la discrťtisation de l'hťmicube a, A, b et B pour dťplacer la cellule testťe Espace pour changer de face sur l'hťmicube Touches de curseur et/ou souris pour manipuler le schťma |


Plus la discrťtisation de l’hťmicube est poussťe, meilleure est l’estimation du facteur de forme, mais plus long est le calcul.
La technique prťcťdente permet de calculer une bonne approximation du facteur de forme d'une facette vis ŗ vis d'une autre facette.
ProblŤme : Elle ne permet pas de tenir compte des occultations ťventuelles entre les facettes.
|
Occultations entre facettes pour le calcul des facteurs de forme |
|
|
|
Touches de curseur et/ou souris pour manipuler le schťma |
Pour rťsoudre ce problŤme, on rťalise un Z-Buffer de la scŤne sur chacun des cinq plans de projection.
Cette technique rťalise l'ťlimination des parties cachťes depuis dAi pour l'ensemble des surfaces de la scŤne en projection sur chacune des cinq faces de l'hťmicube.
|
Calcul d'une ligne de facteurs de forme en tenant compte des occultations |
|
|
|
Enter pour switcher entre une des trois facettes et les trois facettes ensemble pour le calcul des facteurs de forme a, A, b, B, c et C pour dťplacer une facette Espace pour changer la facette dťplaÁable +/- pour augmenter/diminuer la discrťtisation de l'hťmicube Touches de curseur et/ou souris pour manipuler le schťma |
En fait, on calcule la matrice de facteurs de forme non plus composante aprŤs composante, mais ligne aprŤs ligne.
La technique de calcul des facteurs de forme par hťmicube s'est imposťe au cours du temps car elle permet de s'appuyer sur l'implantation hard du Z-Buffer rťalisťe sur les adaptateurs graphiques et est donc ainsi "rapide".
Constitution du systŤme d’ťquations linťaires
Soit une surface i.
On ťtablit
oý Bi et Bj sont les radiositťs des surfaces i et j (mesurťes en ťnergie/unitť de temps/unitť de surface), Ei est l’ťnergie intrinsŤque ťmise par la surface i, ri est la rťflectivitť de la surface i, Fji est le facteur de forme de la surface j vers la surface i et Ai et Aj sont les aires des surfaces i et j.
On ťtablit aussi que Ai Fij = Aj Fji
->
On obtient le systŤme d’ťquations linťaires :
Remarque : La diagonale n’est pas forcťment ťgale ŗ 1 (le facteur de forme d'une surface vis ŗ vis d'elle-mÍme peut Ítre diffťrent de 0) car une surface s non plane peut s’ťclairer elle-mÍme.
Rťsolution du systŤme d’ťquations linťaires
On rťsout gťnťralement le systŤme d'ťquations par une mťthode itťrative : Gauss-Seidel ou Jacobi par exemple.
-> On arrÍte la rťsolution du systŤme ŗ l'itťration permettant d'atteindre le niveau de prťcision dťsirť (invariance entre deux ťtats successifs obtenue sur les radiositťs ou les images affichťes avec ces radiositťs).
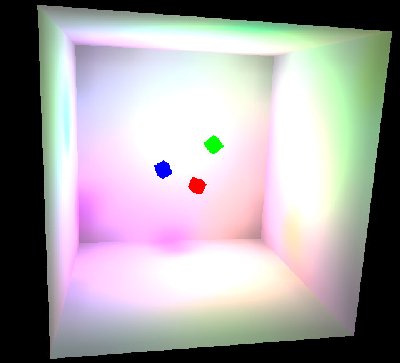
Ce systŤme díťquations est rťsolu pour les trois composantes rouge, verte et bleue (valeurs de rťflectivitť et d'ťmission intrinsťque diffťrentes dans le systŤme d'ťquations linťaires) permettant ainsi d’obtenir des images colorťes.
Radiositť avec affichage par Z-Buffer et ombrage plat
Radiositť avec affichage par Z-Buffer et ombrage de Gouraud
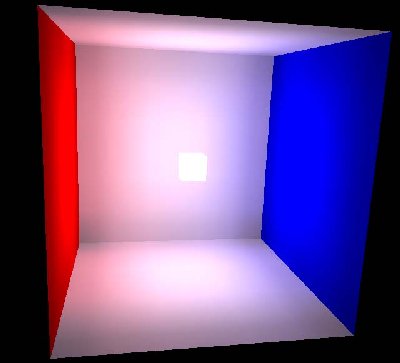
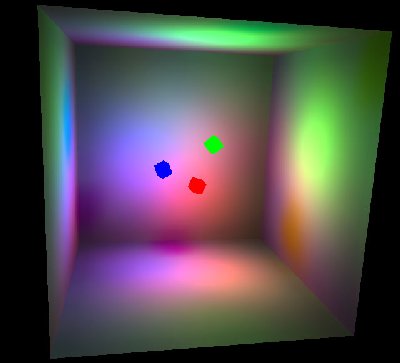
Mise en ťvidence de rťflexions colorťes
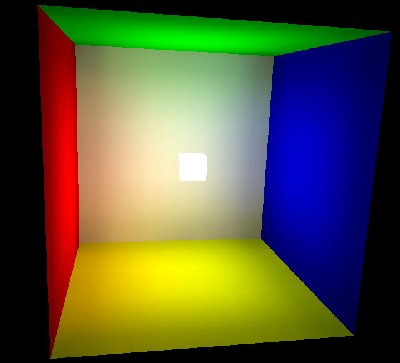
Mise en ťvidence de rťflexions colorťes
-
Au niveau de la qualitť de l’affichage
On obtient une trŤs bonne estimation des flux d'ťnergie ŗ l'intťrieur de la scŤne.
-> Des images trŤs rťalistes du point de vue des ťclairages sont crťťes.
Le calcul de l’ťquilibre ťnergťtique intŤgre de maniŤre trŤs prťcise le calcul de la composante de lumiŤre ambiante de chaque surface, ce qui conduit gťnťralement ŗ des lumiŤres douces qui semblent tamisťes (rťsolution des problŤmes d'illumination locale inhťrents aux autres algorithmes de rendu). Les scŤnes d'intťrieur tire un grand profit de ce type de rendu.
La rťalisation de l'algorithme d'affichage (par exemple un Z-Buffer associť ŗ un lissage de Gouraud) renforce encore ce phťnomŤne.
On modťlise les ombres portťes car on gŤre les occultations entre objets.
-
Au niveau de la rapiditť de calcul
Une fois l’ťquilibre ťnergťtique calculť, l’affichage d’une scŤne est trŤs rapide (rapiditť du Z-Buffer ou du lancer de rayons).
Contrairement au lancer de rayons, on n’a pas ŗ recalculer l’ťquilibre si on effectue un dťplacement de l'observateur ŗ l’intťrieur de la scŤne. Tant que la scŤne n’est pas modifiťe, les calculs d’animation sont extrÍmement rapides.
-
Au niveau de la qualitť de l’affichage
Cet algorithme ne tient compte que de la lumiŤre "diffusťe". Il ne peut pas rendre compte des transmissions et des rťflexions spťculaires.
La discrťtisation de la scŤne et des calculs de facteurs de forme par mťthode de l'hťmisphŤre ou l'hťmicube fait que certains problŤmes d'aliasage peuvent apparaÓtre entraÓnant des problŤmes comme par exemple sur les ombres :
- bords trop flous et/ou crťnelťs,
- ombres portťes absentes pour les objets trop minces,
ou sur les ťclairages :
- mauvais ťclairage de certaines zones (apparition de motifs en "taches de lťopard"),
- manque de prťcision sur l'ťclairage des objets placťs prŤs de l'observateur et donc apparaissant gros ŗ l'ťcran.
-
Au niveau de la rapiditť de calcul
Les deux phases (a) de calcul des facteurs de forme et (b) de rťsolution du systŤme d’ťquations linťaires demandent des quantitťs de calcul importantes. La phase de calcul des facteurs de forme est la plus longue.
Plus on veut un rťsultat proche de la rťalitť, plus la discrťtisation de la scŤne doit Ítre poussťe et donc plus le temps de calcul est important. De plus, on est confrontť ŗ la rťsolution successive de deux problŤmes en n2 du nombre de facettes (potentiellement trŤs grand) :
- le calcul et le stockage des facteurs de forme,
- la rťsolution du systŤme.
Radiositť progressive
Le problŤme de la structure de donnťes en n2 trouve sa solution avec la technique de radiositť progressive.
Cette technique a pour but de rťsoudre progressivement le systŤme d'ťquations linťaires sans stockage de l'ensemble de la matrice des facteurs de forme. On ne la calcule que ligne par ligne au moment oý chaque ligne est utilisťe lors de la rťsolution du systŤme d'ťquations linťaires.
L'algorithme est itťratif, basť sur une boucle infinie. Il traite les surfaces de la scŤne les unes aprŤs les autres pour ťvaluer et affecter l'ťnergie
qu'elles ťmettent vers les autres surfaces.
Une ťnergie dťjŗ ťmise n'a plus ŗ Ítre ťmise.
-> On utilise deux tableaux pour stocker les radiositťs dťjŗ calculťes, mais aussi les portions de ces radiositťs qui n'ont pas encore ťtť ťmises
(crťťes, depuis la derniŤre ťmission, par rťception depuis les autres facettes puis rťťmission).
Algorithme
Dťclarer un tableau d'ťnergie B destinť ŗ contenir la radiositť
de chacune des n surfaces
Dťclarer un tableau d'ťnergie DB destinť ŗ contenir l'ťnergie restant ŗ ťmettre par chacune des n surfaces (ťnergie reÁue depuis la derniŤre
ťmission)
Initialiser B et DB avec les valeurs d'ťnergie ťmise intrinsŤquement par chaque surface
Faire
Choisir une surface F parmis les n surfaces (par exemple celle prťsentant la valeur DB maximale)
Calculer le tableau de facteurs de forme FF associť ŗ F
// Allouer la fraction d'ťnergie ťmise par F ŗ chacune des autres facettes
pour chaque surface FA
// Calculer l'ťnergie reÁue par FA de la facette F et rťťmise
DR = roFA * DB[F] * FF[FA] * AF / AFA
// Incrťmenter les tableaux DB et B avec l'ťnergie rťťmise par FA
DB[FA] += DR
B[FA] += DR
fin pour
// Mettre ŗ 0 l'ťnergie restant ŗ ťmettre par la surface f
DB[F] = 0
Calculer l'image correspondant aux n surfaces affectťes des radiositťs stockťes dans B
Tant que l'image n'est pas satisfaisante
On sait que cette technique de rťsolution permet la convergence vers la bonne solution. Un problŤme est que le temps de convergence ne peut pas Ítre contrŰlť.
Le seul contrŰle offert par cet algorithme concerne le choix de la surface F considťrťe ŗ chaque itťration. On accťlŤre la convergence en choisissant la surface possťdant la radiositť maximale restant ŗ ťmettre.
Remarque : On peut Ítre appelť ŗ calculer plusieurs fois, au cours de l'exťcution, la ligne de facteurs de forme concernant une surface.
Radiositť progressive
Convergence vers l'image dťfinitive
On limite les problŤmes d'aliasage en utilisant une technique de discrťtisation de la scŤne permettant d'augmenter la prťcision (augmenter le nombre de surfaces) dans les zones critiques.
La technique gťnťralement employťe consiste ŗ subdiviser rťcursivement les surfaces.
On pourra dťtecter ces zones critiques par le fait que deux surfaces voisines situťes ŗ leurs limites prťsentent des valeurs Fdi-j diffťrant d'une valeur supťrieure ŗ une limite prťdťfinie.

Une cathťdrale
Une usine
La technique de calcul de l'illumination globale permet de calculer au mieux la composante de lumiŤre ambiante due aux rťflexions diffuses multiples (infinies) gťnťrťes sur chaque surface diffusante d'une scŤne. Elle permet l'obtention d'images de trŤs bonne qualitť aux lumiŤres douces telles qu'elles apparaissent trŤs souvent dans la rťalitť quand les ťclairages sont indirects ou diffus.
Cet effet est renforcť par la dťfinition possible, contrairement au lancer de rayons, de sources lumineuses non ponctuelles (surfaces lumineuses) et par la rťalisation de l'algorithme d'affichage.
L'obtention d'images photorťalistes se heurte ŗ l'impossibilitť de modťliser les rťflexions spťculaires et les transmissions.
Une technique frťquement employťe pour obtenir des images de grande qualitť consiste ŗ faire prťcťder un rendu par lancer de rayons, d'une phase de calcul des radiositťs permettant une ťvaluation correcte des ťclairages ambiants.
Un autre inconvťnient des calculs de radiositť est la lenteur.