Les courbes et
surfaces lissťes
PARAM…TRIQUES
CUBIQUES
Dťfinition
Propriťtťs, applications
COURBES
DE B…ZIER
Dťfinition
Propriťtťs
Algorithme
COURBES B-SPLINES
NON RATIONNELLES
UNIFORMES
Dťfinition
Propriťtťs
Algorithme
SPLINES
DE CATMULL-ROM
Dťfinition
Propriťtťs
B-SPLINES NON
RATIONNELLES UNIFORMES
SURFACES
PARAM…TRIQUES
BICUBIQUES
Dťfinition
Propriťtťs
QUADRIQUES
Dťfinition
Exemples
![]()
1. ProblŤmatique
La modťlisation par facettes se heurte au problŤme de la crťation des ensembles de facettes permettant de modťliser des objets ťlťmentaires. En effet
il s'agit lŗ d'une t‚che possiblement difficile. Une solution algorithmique existe gťnťralement pour les objets modťlisables au moyen d'ťquations
mathťmatiques. Malheureusement, tous les objets ne sont pas modťlisables au moyen d'ťquations mathťmatiques.
Une technique courament utilisťe consiste ŗ crťer chacun des objets graphiques que l'on souhaite modťliser ŗ partir d'un ensemble restreint
de sommets qui lui sera propre et qui sera employť pour gťnťrer les autres sommets nťcessaires au moyen d'ťquations mathťmatiques spťcifiques.
Ces sommets sont souvent nommťs "points de contrŰle" car leurs positions contrŰlent la forme de l'objet obtenu.
|
Modťlisation ŗ base de sommets de contrŰle : marqueurs jaunes et vert ci-dessous |
|
|
|
Touches de curseur pour changer la position du point de contrŰle sťlectionnť (en vert) Espace pour switcher entre les points de contrŰle |
MÍme si cela n'est pas obligatoire, les positions des sommets mathťmatiquement gťnťrťs ŗ partir des points de contrŰle seront gťnťralement telles
que la forme de la "structure" gťomťtrique ainsi obtenue "lissera" la forme de la structure grossiŤre formťe des points de contrŰle :
- une courbe lissťe ŗ partir d'une ligne polygonale,
- une surface lissťe ŗ partir d'un maillage (gťnťralement quadrangulaire).
Ceci explique l'utilisation en informatique graphique de concepts mathťmatiques relatifs aux courbes lissťs.
2. Les courbes paramťtriques cubiques en 3D
Courbe paramťtrique cubique Q de R3 (donc en 3D) : Courbe dťfinie par le systŤme d'ťquations paramťtriques cubiques suivant :
![]() (1)
(1)
Pour obtenir des segments de courbe, on considŤre que l'unique paramŤtre variable t appartient ŗ un intervalle [min,max] (frťquemment [0.0,1.0]).
Reformulation matricielle
La formulation (1) est peu pratique pour la finalitť qui est la notre. En effet, elle ne fait pas directement apparaÓtre la notion de point de contrŰle. Une reformulation matricielle permet de rťsoudre cette difficultť.
Soit le vecteur T = (t3, t2, t, 1.0).
Le systŤme (1) síťcrit sous la forme Q(t) = (x(t), y(t), z(t)) = T.C avec C =
 et
et
![]() .
.
4 coefficients numťriques constants sont nťcessaires pour dťfinir chacune des 3 ťquations paramťtriques.
-> 4 contraintes mathťmatiques sont imposťes pour dťfinir l'ťquation selon chacun des 3 axes.
Pour faire "apparaÓtre" des points de contrŰle, on transforme la matrice C en la matrice produit M.G oý M est une matrice 4x4 de valeurs
numťriques rťelles (appelťe matrice de base) et G est une matrice 4x3 (appelť vecteur gťomťtrie) de 4 contraintes gťomťtriques : 4 points de
contrŰles.
Les lignes de G sont donc occupťes par les 3 coordonnťes de chaque point de contrŰle.
Q(t) = (x(t), y(t), z(t)) = T.C = T.M.G =
 (2)
(2)
La matrice G permet donc de reprťsenter 4 contraintes gťomťtriques s'appliquant ŗ la courbe qui s'apparenteront ŗ la position de 4 points dans l'espace de reprťsentation. La courbe gťnťrťe ťvoluera "entre" ces 4 points.
La matrice M permet d'attribuer des "poids" respectifs ŗ chacun des coefficients ti s’appliquant ŗ une contrainte gťomťtrique, permettant ainsi de dťfinir la "forme" de la courbe.
De bons choix de matrice M permettront d'obtenir des tracťs de courbe approximant la ligne polygonale ŗ 4 sommets dťfinie par les 4 points de contrŰle.
Diffťrents choix permettront d'obtenir des tracťs prťsentant diffťrentes caractťristiques.
|
Trois types de courbes paramťtriques cubiques obtenus par paramťtrage de la matrice M |
|
|
|
|
 |
 |
 |
|
|
Enter pour switcher entre des affichages utilisant |
|
Les courbes de cette famille ont pour propriťtťs d'Ítre:
- continues,
- de dťrivťs premiŤres en t continues (dťrivation en t de chaque composante de T pour obtenir T'= (3.0*t2, 2.0*t, 1.0, 0.0)),
- de dťrivťs secondes en t continues (double dťrivation en t de chaque composante de T pour obtenir T" = (6.0*t, 2.0, 0.0, 0.0)).
Il sera donc possible de calculer la tangente ŗ la courbe en un point dťfini par la valeur t (pour le vecteur T = (t3, t2,
t, 1.0)) en appliquant la formule de calcul (2), mais pour le vecteur T' = (3.0*t2, 2.0*t, 1.0, 0.0).
| Tangente ŗ une courbe paramťtrique cubique |
|
|
|
Enter pour switcher entre des affichages utilisant |
En pratique
D'un point de vue pratique, gťnťrer une courbe paramťtrique cubique nťcessitera de :
- dťfinir la position des 4 points de contrŰle (dťfinir la matrice G),
- choisir la matrice base (la matrice M) correspondant au rťsultat souhaitť,
- choisir le nombre n de points ŗ gťnťrer,
- choisir l'intervalle de variabilitť [ti,tf] ŗ utiliser pour t (cet intervalle est trŤs gťnťralement [0.0,1.0]),
- calculer n valeurs t uniformťment rťparties entre ti et tf,
- trouver la position de chacun des n points de la courbe en appliquant la formule de calcul (2) pour chaque valeur de t calculťe ci-dessus.
Les propriťtťs de continuitť, de continues dťrivabilitťs premiŤre et seconde sont primordiales car elles assurent la possibilitť de se dťplacer uniformťment
sur tous les points de la courbe. Elles assurent aussi que, quand on fait varier t uniformťment, la vitesse de dťplacement est continue (pas de dťplacement
instantanť) et l'accťlťration du dťplacement est continue (pas de saute de vitesse instantanťe).
Gťomťtriquement, ces propriťtťs nous assurent que ces courbes n'ont pas de trou et ne prťsentent pas de rupture dans l'orientation des tangentes
c'est ŗ dire qu'elles sont bien courbes (non brisťes) et donc sans changement de direction instantanť.
Les courbes paramťtriques cubiques ne sont pas dťformťes par transformation gťomťtrique de type translation, rotation, zoom (ou composition de ces
types de transformation, donc par exemple projection parallŤle orthographique) de leurs points de contrŰle. En revanche, elles sont modifiťes si
on souhaite faire une transformation de type mise en perspective.
Cette propriťtť signifie que si on doit par exemple effectuer une transformation gťomťtrique M sur une courbe paramťtrique cubique Q dťfinie ŗ partir
des points de contrŰle G1, G2, G3, et G4 de faÁon ŗ gťnťrer n points, alors M(Q(n,G1,G2,G3,G4))
= Q(n,M(G1),M(G2),M(G3),M(G4)) si M est d'un des types possibles dťfinis ci-dessus.
Pourquoi est-il beaucoup plus efficace de calculer selon le terme droit ? Solution
ProblŤmatique : Les courbes paramťtriques cubiques sont dťfinies sur 4 points de contrŰle. Que faire si on en a moins (3 points) ou plus (5, 6, 7 points ou encore plus) ?
P0, P1, P2, P3, ..., Pn sont les n+1 points dťfinissant une ligne polygonale (n > 1). La
courbe de Bťzier dťfinie par ces points est dťfnie par l'ťquation paramťtrique de degrť n suivante :
 avec t ∈ [0.0,1.0].
(3)
avec t ∈ [0.0,1.0].
(3)
On rappelle que
 .
.
Telle qu'elle est formulťe, cette ťquation fait rťfťrence aux point Pi. En 3D, elle s'implante sous la forme de trois ťquations :
une ťquation x(t) qui reprend les coordonnťes x des Pi, une ťquation y(t) qui reprend les coordonnťes y des Pi, une ťquation
z(t) qui reprend les coordonnťes z des Pi. L'ťquation (3) est donc utilisťe 3 fois.
On a donc C(t) = (x(t), y(t), z(t)).
|
Une courbe de Bťzier construite sur un nombre arbitraire de sommets En cyan la courbe gťnťrťe en utilisant l'implantation OpenGL de calcul des courbes de Bťzier En magenta la courbe obtenue par notre implantation de la formule |
|
|
|
Enter pour switcher entre 2, 3, 4, 5 et 6 points |
Une courbe de Bťzier
- commence par le premier point de contrŰle, finit par le dernier point de contrŰle et ne passe pas gťnťralement par les autres points de
contrŰle,
- est tangente au segment P0,P1 en P0 et au segment Pn,Pn-1 en Pn,
- n'est pas dťformťe par translation, rotation, zoom et composition de ces transformations,
- est dťformťe par changement des paramŤtres de mise en perspective.
ProblŤmes
Temps de calcul :
- Quoique pouvant Ítre optimisť, le calcul des Cin n'est pas ťconomique en temps.
- Les deux mises ŗ la puissance en t et en 1-t ne sont pas ťconomiques en temps.
Aptitude ŗ assurer une fonction d'outil de modťlisation :
- La courbe est intťgralement modifiťe quand on modifie la position d'un seul point de contrŰle. Ceci a pour consťquence l'obligation
de la rťťvaluer intťgralement. Il n'y a donc pas de contrŰle local sur la forme de la courbe.
- Lorsqu'une courbe de Bťzier est tracťe avec beaucoup de sommets, les sommets intermťdiaires sont peu "attractifs". La courbe
reste donc loin d'eux. Il n'y a donc pas de fort contrŰle de la forme de la courbe.
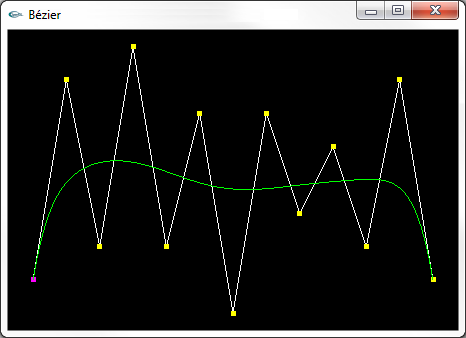
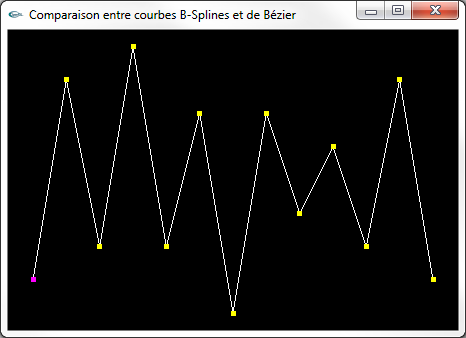
|
Une courbe de Bťzier construite sur une ligne polygonale de 13 points de contrŰle |
|
|
|
Espace pour changer de sommet sťlectionnť (en magenta) |
Algorithme (langage C)
Prťcision : Le calcul des Cin est prťtraitť dans un tableau de faÁon ŗ en optimiser le temps de calcul global.
struct coord_3D {
GLfloat x = 0.0F;
GLfloat y = 0.0F;
GLfloat z = 0.0F;
GLfloat w = 1.0F; };
struct lignePolygonale {
int n = 0;
coord_3D *p = NULL; };
void point(float x,float y,float z) {
glVertex3f(x,y,z);
}
/* Trace la courbe de Bezier formee de n points */
/* generee a partir de la ligne polygonale p */
void bezier(lignePolygonale *p,int n) {
float x,y,z;
float *cn =(float *) calloc(p->n,sizeof(float));
cn[0] = 1;
cn[1] =(float) (p->n-1);
for ( int i = 2 ; i < p->n ; i++ )
cn[i] = cn[i-1] * (p->n - i) / i;
for ( int i = 0 ; i < n ; i++ ) {
float t =(float) i/(n-1);
float mt = 1.0F-t;
x = y = z = 0.0F;
for ( int j = 0 ; j < p->n ; j++ ) {
float fac = cn[j]*(float) pow(t,j)*
(float)
pow(mt,p->n-1-j);
x += fac * p->p[j].x;
y += fac * p->p[j].y;
z += fac * p->p[j].z; }
point(x,y,z); }
free(cn);
}
Cas particulier
Si n = 3 (4 sommets), C(t) peut Ítre prťsentťe sous la forme d'une courbe paramťtrique cubique dťfinie par les 4 points de contrŰle P0, P1, P2, P3. Les 4 contraintes gťomťtriques G1, G2, G3 et G4 sont alors les positions de ces 4 points de contrŰle.
On a alors:
C(t) = (x(t), y(t), z(t)) =
ProblŤmatique : Comment acquťrir un contrŰle local et obtenir un bon lissage avec beaucoup de points de contrŰle ?
Solution : Relier 2 courbes de Bťzier dťfinies sur 4 sommets tels que le dernier sommet dťfinissant la premiŤre courbe soit confondu avec le premier sommet de la seconde. C'est ŗ dire tracer la courbe Pi avec 0 <= i <= 6 (soit au total 7 sommets diffťrents).
Assemblage de 2 courbes de Bťzier
Les conditions suivantes doivent Ítre respectťes pour que les propriťtťs de continues dťrivabilitťs premiŤre et seconde souhaitťes soient obtenues
au point P3 qui est le point problťmatique :
- Si P2, P3 et P4 sont sur la mÍme droite alors il y a continue dťrivabilitť au point P3.
- Si les distances entre P2 et P3 d'une part et P3 et P4 d'autre part sont identiques
alors il y a continue dťrivabilitť seconde au point P3.
|
Une courbe construite par assemblage de 2 courbes de Bťzier ŗ 4 points de contrŰle |
|
|
|
Espace pour changer de sommet |
Avantages
- On dispose d'un contrŰle local.
- La courbe est "bien" lissťe et contrŰlťe.
- Il est possible d'ajouter des points de contrŰle.
Inconvťnient
- Tous les points de contrŰle ne sont pas "au mÍme niveau". Il y a les points partagťs et les autres.
- Le nombre de points de contrŰle peut dťpasser 4 mais il n'est pas totalement libre car il est ťgal ŗ 1+3*n oý n est le nombre de morceaux
de Bťzier dessinťs.
- A cause des contraintes gťomťtriques indiquťes ci-dessus les points de contrŰle ne sont pas indťpendants les uns des autres.
Application
- Tracť de courbes lissťes quand le nombre de points de contrŰle n'est pas fortement imposť
-> Utilisation dans les logiciels de dessin vectoriel et de modťlisation gťomťtrique
4. Les courbes B-Splines (splines non rationnelles uniformes)
ProblŤmatique : Comment lisser une ligne polygonale quelconque de telle faÁon que la modification de la position d'un seul
sommet ne modifie pas l'intťgralitť de la courbe et que l'on ait une bonne capacitť de lissage, c'est ŗ dire que la courbe soit assez
attirťe par les points de contrŰle ?
-> En cas de modification de la position d'un point de contrŰle, seule une partie limitťe de la courbe lissťe aura ŗ Ítre recalculťe.
P0, P1, P2, P3, ..., Pn-1 sont les n points dťfinissant une ligne polygonale P (n >= 4, 0 <= i < n).
Les n points de P permettent de dťfinir les n-3 vecteurs gťomťtriques Gi =
![]() avec 0 <= i
< n-3.
avec 0 <= i
< n-3.
Ces n-3 vecteurs gťomťtriques permettent la gťnťration de n-3 morceaux de courbe paramťtrique cubique
calculťs sur l'intervalle de variabilitť [0.0,1.0] pour t (variation uniforme sur cet intervalle) en utilisant la matrice de base
. Ces morceaux sont jointifs (voir preuve ci-dessous). Une
fois rťunis ils formeront une courbe lissťe approximant la ligne polygonale P. A toutes les jointures les dťrivťes premiŤre et seconde sont ťgales
(preuve non fournie ici mais dťrivťe de celle de la continuitť).
Assemblage de morceaux de courbe
pour construire une courbe B-Spline
Continuitť des B-Splines
Les morceaux de courbe B-Spline se joignent obligatoirement en leurs extrťmitťs. En effet, soient les deux morceaux de courbe correspondant ŗ Gi
et Gi+1, le premier se finit ŗ t = 1.0, le second commence ŗ t = 0.0. En ces points, on calcule que les coordonnťes obtenues sont identiques
et ont pour valeur
![]() . Cette position est quelque part ŗ l'intťrieur du triangle
dťfini par les trois sommets, plus proche de PPi+2 que des 2 autres car il s'agit du barycentre des points Pi+1, Pi+2
et pi+3 respectivement affectťs des poids 1.0, 4.0 et 1.0.
. Cette position est quelque part ŗ l'intťrieur du triangle
dťfini par les trois sommets, plus proche de PPi+2 que des 2 autres car il s'agit du barycentre des points Pi+1, Pi+2
et pi+3 respectivement affectťs des poids 1.0, 4.0 et 1.0.
ContrŰle local
Chaque morceau de courbe dťpend de 4 points de contrŰle. Chaque point de contrŰle intervient sur au maximum 4 morceaux de courbe.
-> On n'a pas l'obligation de recalculer toute la courbe si un seul point est modifiť, mais seulement 4 morceaux au maximum.
Attractivitť des points de contrŰle
La preuve de continuitť a dťterminť que les points de jointure sont situťs dans les triangles (Pi+11,Pi+2, pi+3) et, dans ces triangles, assez attirťs par les points Pi+22, (poids 4.0 pour ce point, 1.0 pour les deux autres). Les points de contrŰle attirent donc assez fortement la courbe gťnťrťe.
Les courbes B-Splines NRU :
- ne passent pas par les sommets de la ligne polygonale maÓtresse, y compris le premier et le dernier,
- respectent la continuitť, la continue dťrivabilitť premiŤre et la continue dťrivabilitť seconde.
Une solution simple pour passer par le premier et le dernier point consiste ŗ tripler ces points.
Algorithme (langage C)
struct coord_3D {
GLfloat x = 0.0F;
GLfloat y = 0.0F;
GLfloat z = 0.0F;
GLfloat w = 1.0F; };
struct lignePolygonale {
int n = 0;
coord_3D *p = NULL; };
typedef float matrice[4][4] ;
void point(float x,float y,float z) {
glVertex3f(x,y,z);
}
/* Trace un morceau de courbe B-Spline */
/* p est le tableau des 4 points de controle */
/* n est le nombre de points generes */
/* m est la matrice de base utilisee */
void morceauBSpline(coord_3D *p,int n,matrice m) {
float tt[4],ttt[4],x,y,z ;
for ( int i = 0 ; i < n ; i++ ) {
float t =(float) i/(n-1) ;
tt[0] = t*t*t ;
tt[1] = t*t ;
tt[2] = t ;
tt[3] = 1.0F ;
for ( int j = 0 ; j < 4 ; j++ ) {
ttt[j] = 0.0F ;
for ( int k = 0 ; k < 4 ; k++ )
ttt[j] += tt[k] * m[k][j] ; }
x = y = z = 0.0F ;
for ( int j = 0 ; j < 4 ; j++ ) {
x += ttt[j] * p[j].x ;
y += ttt[j] * p[j].y ;
z += ttt[j] * p[j].z ; }
point(x,y,z) ; }
}
/* Trace une courbe B-Spline par morceaux */
/* m est la matrice de base utilisee */
/* p est la ligne polygonale lissee */
/* n est le nombre de points generes sur chacun */
/* des p->n-3 morceau traces
*/
/* ATTENTION : Les points de rattachement */
/* des morceaux de B-Spline sont generes deux fois. */
void BSpline(lignePolygonale *p,matrice m,int n) {
for ( int i = 0 ; i < p->n-3 ; i++ )
morceauBSpline(&p->p[i],n,m) ;
} }
|
Une courbe B-Spline NRU construite sur 6 points de contrŰle |
|
|
|
Enter pour switcher entre des affichages |
5. Les courbes Splines de Catmull-Rom
ProblŤmatique : Comment lisser une ligne polygonale par une courbe paramťtrique cubique passant par chacun des sommets de cette
ligne.
-> Utilisation des courbes Splines de Catmull-Rom.
P0, P1, P2, P3, ..., Pn-1 sont les n points dťfinissant une ligne polygonale P (n >= 4, 0 <= i < n).
On dťfinit les n-3 vecteurs gťomťtriques Gi =
![]() avec 0 <= i < n-3.
avec 0 <= i < n-3.
La matrice de base utilisťe pour la gťnťration des morceaux de Spline est
et l'intervalle de variabilitť uniforme de t est [0.0,1.0].
Pour le vecteur gťomťtrique Gi, la courbe commence pour t = 0.0 en Pi+1, et finit pour t = 1.0 en Pi+2. Les morceaux se rejoignent bien et, de plus, ils se rejoignent au niveau des points de contrŰle.
Assemblage de morceaux de courbe
pour construire une courbe Spline de Catmull-Rom
|
Une spline de Catmull-Romm construite sur 6 points de contrŰle |
|
|
|
Enter pour switcher entre des affichages |
Les courbes splines ainsi dťfinies :
- passent par tous les sommets de la ligne polygonale, ŗ l'exception du premier et du dernier,
- commencent au deuxiŤme point et finissent ŗ l'avant dernier point de la ligne polygonale maÓtresse,
- sont tangentes au point Pi ŗ la direction donnťe par la droite passant par les points Pi-1 et Pi+1,
- respectent la continuitť, les continues dťrivabilitťs premiŤre et seconde.
Une solution simple pour passer par le premier et le dernier point consiste ŗ doubler ces points.
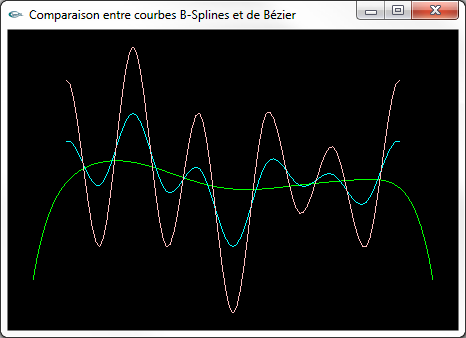
6. Comparaison entre courbes lissťes
Le programme ci-dessous prťsente l'affichage des trois types de courbe lissťe prťsentťs dans ce chapitre.
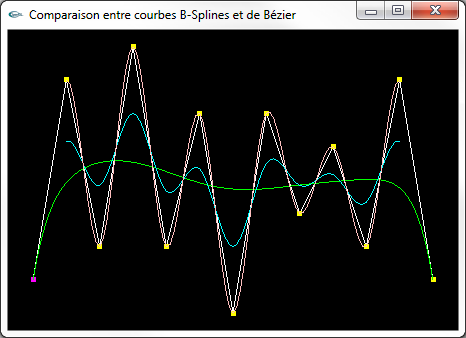
|
Courbes lissťes construites sur une ligne polygonale de 13 points de contrŰle Vert : Courbe de Bťzier Cyan : Courbe B-Spline NRU Rose : Courbe spline de Catmull-Rom |
|
|
|
Espace pour changer de sommet sťlectionnť (en magenta) |
![]()
![]()
7. Les courbes B-Splines non uniformes rationnelles : les NURBS
Problťmatique : Une B-Spline non rationnelle est calculťe au moyen de points de contrŰle. Si elle est visualisťe en perspective,
la mÍme courbe devra Ítre toujours Ítre modťlisťe et affichťe quels que soient les paramŤtres de mise en perspective. Or, il n'est pas possible
de placer les points de contrŰle en perspective et de calculer la B-Spline ensuite. On devra d'abord calculer la B-Spline pour ensuite faire
la mise en perspective sur l'ensemble des points obtenus. Faute de cet ordre de manipulation, la B-Spline obtenue n'est pas invariante par
modification des paramŤtres de mise en perspective avec pour consťquence des problŤmes de visualisation.
Cet ordre de calcul est inefficace en temps de calcul car le nombre de sommets de la courbe lissťe est plus grand que le nombre de points de contrŰle.
Solution : Utiliser les B-Splines non-uniformes rationnelles.
Dťfinition mathťmatique
Courbe NURBS :
 avec x(t), y(t), z(t) et w(t) des ťquations paramťtriques cubiques reprťsentant des coordonnťes homogŤnes.
avec x(t), y(t), z(t) et w(t) des ťquations paramťtriques cubiques reprťsentant des coordonnťes homogŤnes.
8. Les surfaces paramťtriques bicubiques
Les surfaces paramťtriques bicubiques sont une gťnťralisation aux surfaces des courbes paramťtriques cubiques.
Soit une courbe cubique Q(s) = S.M.G (s et S sont ťquivalents ŗ t et T). Le vecteur gťomťtrique G est constituť de composantes constantes. Si ces composantes sont remplacťes par des courbes paramťtriques cubiques, on obtient :
Q(s,t) = S.M.G(t) = S.M. avec s et t compris dans l'intervalle [0.0,1.0].
avec s et t compris dans l'intervalle [0.0,1.0].
Les Gi sont des cubiques.
-> Gi(t) = T.M'.Pi avec Pi = (Pi1,Pi2,Pi3,Pi4)T
-> Gi(t) = (T.M'.Pi)T = PiT.M'T.TT
= (Pi1,Pi2,Pi3,Pi4).M'T.TT.
Prťcision : On utilise deux matrices de base M (celle de la courbe Q(s)) et M' (celle des courbes Gi(t)) car il n'est pas
obligatoire que Q(s) et les Gi(t) aient la mÍme matrice de base.
Chaque point Pij est un point de contrŰle de Gi(t).
-> On a au total 4x4 = 16 points de contrŰle Pij
Reconstruite sous la forme d'une formule unique, on obtient :
Q(s,t) = S.M. .M'T avec s et t compris dans l'intervalle
[0.0,1.0].
.M'T avec s et t compris dans l'intervalle
[0.0,1.0].
La modification d'un seul des 16 points de contrŰle entraÓne la modification de l'ensemble de la surface.
Le choix des matrices M et M' permet d'adapter les caractťristiques de la surface modťlisťe aux spťcifications dťsirťes.
Ces matrices pourront Ítre celles dťcrites prťcťdemment dans le chapitre (Bťzier, B-Spline NRU, Catmull-Rom) ou route autre matrice.
Elles pourront Ítre identiques ou bien diffťrentes l'une de l'autre pour obtenir certaines caractťristiques selon un axe et des caractťristiques
diffťrentes selon l'autre axe.
Interprťtation intuitive
Une interprťtation intuitive consiste ŗ considťrer qu'une telle surface est gťnťrťe ŗ partir d'une matrice carrťe de 4x4 points de contrŰle. Les 4 lignes de 4 points de cette matrice permettent de gťnťrer 4 sťries primaires de m points qui vont eux-mÍmes Ítre utilisťs pour constituer m sťries de 4 points de contrŰle, chacune de ces m sťries permettant de gťnťrer une serie secondaire de n points modťlisant la surface lissťe. Au total, on obtient donc un maillage quadrangulairede m*n points qui peut Ítre utilisť pour gťnťrť des facettes.
Organisation des 4x4 points de contrŰle en un maillage quadrangulaire (en bleu)
Utilsation de ce maillage pour gťnťrer une surface paramťtrique bicubique
(en vert et rouge pour le bord)
|
Une surface paramťtrique bicubique construite sur 4x4 points de contrŰle avec matrice de base B-Spline NRU selon les deux axes |
| Affichage en mode point |
|
|
|
Touches de curseur pour changer la position du point de contrŰle sťlectionnť (en vert) Espace pour switcher entre les points de contrŰle |
| Affichage en facettes avec un texturage |
|
|
|
Touches de curseur pour changer la position du point de contrŰle sťlectionnť (en vert) Espace pour switcher entre les points de contrŰle |
|
Affichage en facettes avec matťrialisation des normales |
|
|
|
Enter pour switcher entre des affichages utilisant |
![]()
![]()
On appelle surface quadrique une surface d'ťquation :
f(x,y,z) = ax2 + by2 + cz2 + dxy + eyz + fxz + gx + hy + iz + j = 0.0
Cette famille de surfaces est trŤs vaste.
Il est possible de reprťsenter des plans, des sphŤres, des paraboloÔdes, des ellipsoÔdes, …
Les raisons qui pourraient faire utiliser les surfaces quadriques sont multiples :
- Calcul facile de la normale en un point ŗ la surface
- Test facile de la prťsence d'un point sur la surface
- Calcul facile d'une des coordonnťes si les deux autres sont connues
- Calcul possible de l'intersection d'une surface quadrique avec une autre surface quadrique
-
Plans: a = b = c = d = e = f = 0.0
-> f(x,y,z) = gx + hy + iz + j = 0.0 -
EllipsoÔdes: d = e = f = g = h = i = 0, j <= 0.0
-> f(x,y,z) = ax2 + by2 + cz2 + j = 0.0
Les surfaces et courbes lissťes ont ťtť initialement conÁues comme outils de CFAO pour la modťlisation d'objets.
Plus rťcemment, l'informatique graphique s'est emparťe de ces objets mathťmatiques comme outils de modťlisation pour reprťsenter les objets des scŤnes qui ne seraient pas des objets canoniques "simples" (cube, sphŤre, ...) et qui seraient trop complexes ŗ modťliser sous la forme d'un ensemble de facettes gťrťes individuellement. Les surfaces et courbes lissťes viennent "s'intercaler" entre ces deux techniques de modťlisation.
Les outils de haut niveau en modťlisation pour la synthŤse d'images font appel aux NURBS (Non Uniform Rational B-Splines) qui sont une ťvolution des B-Splines pour permettre un affichage en perspective.