Semestre 2 ST
Les matrices de variables, applications pratiques
| Cours | TD | TP |
![]()
| Problťmatique | Dťclaration | Matrices en Mathťmatiques | Matrices en Physique | Matrices en Informatique |
![]()
![]()
![]()
- Emploi de "matrices" de variables dans le cadre de nombreux problŤmes
- Matrice: Tableau ŗ deux indices
Dťclaration de tableaux ŗ deux indices en langage algorithmique et en langage Java
- Chapitre "Tableaux de variables" pour la syntaxe en langage algorithmique ainsi que pour la syntaxe en langage Java.
Matrices pour les Mathťmatiques
-
Matrice: Tableau de variables ŗ deux indices
- Composantes du mÍme type
- Premier indice: Numťro de ligne
- Second indice: Numťro de colonne
| x | x | x | x | x |
| x | x | x | x | x |
| x | x | x | x | x |
nombre lignes = 3, nombre colonnes = 5
-
Vecteur: Tableau de variables ŗ deux indices dont l'une des 2 tailles est ťgale ŗ 1
- Matrice n*1
- Matrice 1*n
Matrice 3*1 |
Matrice 1*5 |
-
Matrices et vecteurs: "Objets" mathťmatiques de mÍme catťgorie: Tableaux ŗ 2 dimensions
-
Si tailles compatibles, objets associables au moyen d'opťrations matricielles:
- Addition
- Soustraction
- Multiplication (composition)
-
Si tailles compatibles, objets associables au moyen d'opťrations matricielles:
- Matrice carrťe: Matrice avec des nombres de lignes et de colonnes identiques
-
En mathťmatiques utilisation frťquente des notions de matrice et de vecteur:
-
Ensemble d'ťlťments:
Un tableau unidimensionnel de taille arbitraire
Exemple: Un ensemble de nombres entier { 1,3,-2,10,7,-5,-4 }
int [] ev = { 1,3,-2,10,7,-5,-4 }; -
Position dans un espace:
Un tableau unidimentionnel de taille ťgale ŗ la dimension de l'espace
Exemples: Coordonnťes 2D , coordonnťes 3D
, coordonnťes 3D 
double [] c2D = new double[2];
double [] c3D = new double[3]; -
Transformation gťomťtrique:
Un tableau bidimentionnel carrť de taille ťgale ŗ la dimension de l'espace
Exemple: Rotation 3D d'angle Qy autour de l'axe Oy
double [][] rot3D = { { Math.cos(thetay),0.0,Math.sin(thetay) },
{ 0.0,1.0, 0.0 },
{ -Math.sin(thetay),0.0,Math.cos(thetay) } }; -
Equation linťaire:
Un tableau unidimentionnel de taille ťgale ŗ 1 + le nombre de variables de l'ťquation linťaire
Exemple: Equation d'un plan dans un espace 3D a x + b y + c z + d = 0
double [] equationLineairePlan3D = { a, b, c, d }; -
SystŤme de ne ťquations linťaires ŗ nv inconnues:
Un tableau bidimentionnel de taille ne*(nv+1) ou un tableau bidimentionnel de taille ne*nv et un tableau unidimentionnel de taille ne
Exemple: Equation d'une droite dans un espace 3D
double [][] systemeEquationsLineairesDroite3D = { { a1, b1, c1, d1 },
{ a2, b2, c2, d2 } }; - ...
-
Ensemble d'ťlťments:
- Utilisation frťquente de matrices carrťes
-
Remarque: Utilisation de tableaux et de matrices possiblement contradictoire avec la rŤgle consistant ŗ dťfinir des types agrťgťs
pour structurer le stockage des donnťes
-> Arbitrer entre faciliter la lecture et la comprťhension et faciliter le dťveloppement dans le cadre de l'utilisation de formules mathťmatiques avec indices
Exemples
- Addition de deux matrices
-
On considŤre deux matrices M1 et M2 de tailles identiques n*m.
La matrice M somme de M1 et M2 est la matrice formťe des composantes mij = m1ij+m2ij pour i de 1 ŗ n et j de 1 ŗ m.
Exemple: 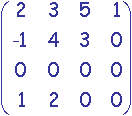 +
+ =
=
|
{ Action de calcul de la somme de deux } |
|
/* Fonction de calcul de la somme */ |
|
SommeMatrices.lda SommeMatrices.java Exemple d'exťcution |
- Mathťmatiques matricielles: Produit matrice par vecteur
-
On considŤre un vecteur
 de taille n et une matrice carrťe M de taille n*n.
de taille n et une matrice carrťe M de taille n*n.
Le vecteur produit de M par
(notť
= M.) est calculť selon la formule:
produit de M par
(notť
= M.) est calculť selon la formule:
wi = pour i de 1 ŗ n
pour i de 1 ŗ n
oý les wi sont les composantes du vecteur, les mik
sont les composantes de la matrice M et les vk sont les composantes du vecteur . -
Prťsentation intuitive du calcul du produit matrice-vecteur: La composante i du vecteur rťsultat est le produit de la iŤme ligne de la matrice par le vecteur
.
Exemple:  .
. =
= 
|
{ Fonction de calcul et retour du produit } |
|
/* Fonction de calcul et retour du produit */ |
|
ProduitMatriceVecteur.lda ProduitMatriceVecteur.java Exemple d'exťcution |
- Mathťmatiques matricielles: Produit matrice par matrice
-
On considŤre une matrice M1 de taille n*m et une matrice M2 de taille m*p.
La matrice M produit de M1 par M2 (notť M = M1.M2) est une matrice de taille n*p et est calculťe au moyen de la formule:
mij = pour i de 1 ŗ n et j de 1 ŗ p
pour i de 1 ŗ n et j de 1 ŗ p
oý les mij sont les composantes de la matrice M, les m1ik sont les composantes de la matrice M1 et les m2kj sont les composantes de la matrice M2. -
Prťsentation intuitive du calcul du produit matrice-matrice: La composante ij de la matrice rťsultat est le produit de la iŤme ligne de la premiŤre matrice par la jŤme colonne de la seconde matrice.
Exemple:  .
. =
= 
|
{ Fonction de calcul et retour du produit } |
|
/* Fonction de calcul et retour du produit */ |
|
ProduitMatriceMatrice.lda ProduitMatriceMatrice.java Exemple d'exťcution |
- AlgŤbre linťaire: Rťsolution d'un systŤme de n ťquations linťaires ŗ n inconnues
-
On considŤre le systŤme de n ťquations linťaires ŗ n inconnues:
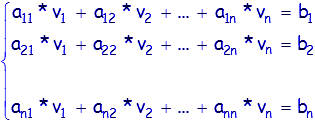
oý les inconnues sont les vi et les constantes sont les aij et les bi. -
Prťsentation possible sous la forme matricielle A.V = B:

oý A est une matrice carrťe de taille n*n, V et B sont des vecteurs de taille n. -
Rťsolution de ce systŤme:
- Dťtermination du vecteur des vi qui vťrifie l'ensemble de ces ťquations et donc du vecteur V qui vťrifie le produit matriciel.
- Trois possibilitťs: V n'existe pas, V existe et est unique, V existe et il y en a une infinitť.
-
Exemples d'applications pratiques:
- En deux dimensions: Trouver la position de l'intersection de deux droites
- En trois dimensions: Trouver la position de l'intersection entre une droite et un plan
- En dimension n avec n trŤs grand (> 1000000): En informatique graphique, calculer l'ťclairage d'une scŤne par radiositť
-
Mťthode de rťsolution par pivot de Gauss
- Une premiŤre ťtape de transformation par "triangularisation":
- Transformation de la matrice A par traitement (substitution) de ses lignes de maniŤre ŗ remplir sa 1/2 matrice triangulaire infťrieure stricte avec des 0.0
-
Transformation concourante du vecteur B pour que le systŤme d'ťquations A.V = B reste ťquivalent
- n-1 itťrations numťrotťes i consistant ŗ soustraire ŗ chaque ligne j ŗ partir de la ligne i+1 le produit de la ligne i par le facteur fact tel que fact*m[i][i] = m[i][j] -> fact = m[i][j]/m[i][i]
-
Calcul de fact impossible si, lors d'une itťration, m[i][i] = 0.0 (division par zťro)
-> Permutation la ligne i avec la premiŤre ligne k oý m[k][i] est diffťrent de 0.0
-> Si tous les m[k][i] ťgaux ŗ 0.0 alors pas de solution unique (aucune solution ou une infinitť de solutions)
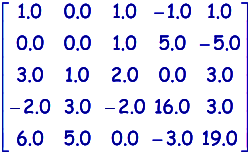
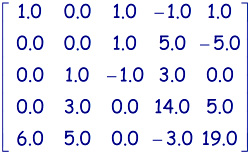
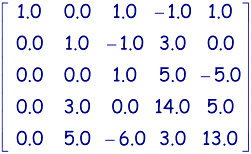
Exemple:
Les matrices A et B sont 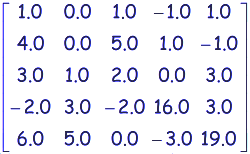 et
et 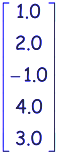 .
.
-
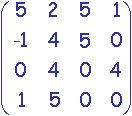
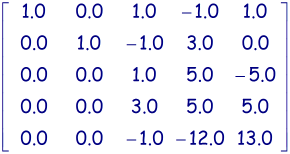
Etape nį1
-
Traitement de la ligne 2 par soustraction de 4.0 fois la ligne 1:
 et
et 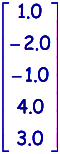 .
. -
Traitement de la ligne 3 par soustraction de 3.0 fois la ligne 1:
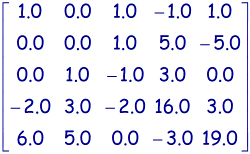 et
et 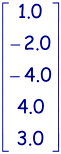 .
. -
Traitement de la ligne 4 par soustraction de -2.0 fois la ligne 1:
 et
et 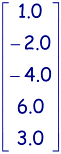 .
. -
Traitement de la ligne 5 par soustraction de 6.0 fois la ligne 1:
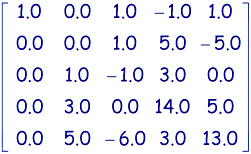 et
et 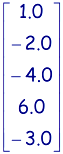 .
.
-
-
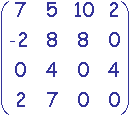
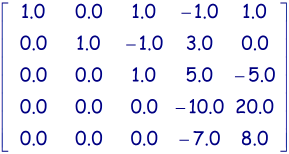
Etape nį2
-
Permutation des lignes 2 et 3 car la composante d'indice (2,2) est ťgale ŗ 0.0:
 et
et 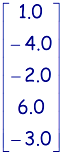 .
. -
Traitement des lignes 4 et 5:
 et
et 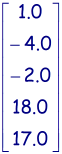 .
.
-
-
Etape nį3
-
Traitement des lignes 4 et 5:
 et
et 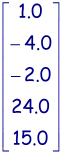 .
. -
Etape nį4
-
Traitement de la ligne 5:
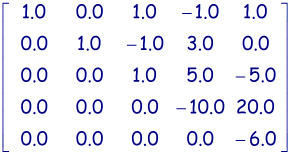 et
et 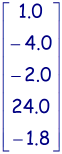 .
.
-
Une seconde (et derniŤre) ťtape: Calcul de V
-
vn d'ores et dťjŗ calculable car sur la ligne n de la matrice A, il ne reste que des 0.0 sauf pour la derniŤre valeur d'indice
(n,n)
-> vn = bn/ann - Calcul de vn-1 possible car, vn ťtant connu, toutes les valeurs nťcessaires ŗ son calcul sont maintenant connues.
- Calcul de vn-2 possible car, vn et vn-1 ťtant connus, toutes les valeurs nťcessaires ŗ son calcul sont maintenant connues.
- Poursuite du calcul des v du calcul des vi jusqu'ŗ v1.
-
vn d'ores et dťjŗ calculable car sur la ligne n de la matrice A, il ne reste que des 0.0 sauf pour la derniŤre valeur d'indice
(n,n)
- v5 = -1.8/-6.0 = 0.3
- v4 = (24.0 - 20.0*0.3)/-10.0 = -1.8
- v3 = (-2.0 + 5.0*0.3 + 5.0*1.8)/1.0 = 8.5
- v2 = (-4.0 + 0.0*0.3 + 3.0*1.8 + 1.0*8.5)/1.0 = 9.9
- v1 = (1.0 - 1.0*0.3 - 1.0*1.8 - 1.0*8.5 + 0.0*9.9)/1.0 = -9.6
|
{ Resolution d'un systeme de n equations } |
|
/* Fonction de calcul et retour d'une copie */ |
|
PivotGauss.lda PivotGauss.java Exemple d'exťcution |
- PhťnomŤnes statiques ou en ťvolution au cours du temps
- Large appel ŗ l'informatique comme outil de simulation
-
Pourquoi simuler?
- Moins cher que les tests rťels (crash d'une automobile, analyse d'un ťcoulement turbulent, ...)
- Rťalisation de prťvisions (mťtťo, ťvolution climatique, crue, ...)
- Analyse de phťnomŤnes qu'il n'est pas possible de tester dans la rťalitť (essai nuclťaire, circulation automobile dans une ville, ťvacuation d'un stade de football, formation du systŤme solaire, explosion d'une ťtoile en super-novae, ...)
- ...
- PhťnomŤnes ŗ simuler frťquement dťcrits par des ťquations (continues ou non) pour lesquelles il n'existe pas de mťthode de rťsolution analytique (i.e. pas de solution prťsentable sous la forme d'une formule simple, voire complexe)
-
Invention de mťthodes numťriques de rťsolution permettant de trouver une solution ŗ partir d'une discrťtisation du champ de travail
- champ unidimentionnel: appel ŗ des tableaux,
- champ bidimentionnel: utilisation de matrices,
- dimension 3: tableaux ŗ 3 indices,
Exemples
-
Propagation de la chaleur au sein d'une barre mťtallique
- ProblŤme en dimension 1
- Dťcomposition (discrťtisation) de la barre en une suite de morceaux pour chacun desquels la tempťrature est considťrťe uniforme
- Valeurs stockťes et gťrťes dans un tableau ŗ 1 indice
- Calcul des transferts de chaleur entre morceaux voisins
- Evolution au cours du temps par calcul d'ťtats successifs sťparťs dans le temps par un "pas de temps" gťnťralement constant
-
Augmentation du pas de discrťtisation spatial et/ou du pas de discrťtisation temporel
-> Obtention de rťsultats plus prťcis au prix d'un temps de calcul plus long
-
Propagation de la chaleur au sein d'une plaque mťtallique
- ProblŤme en 2 dimensions
- Dťcomposition de la plaque en une grille de cellules pour chacune desquelles la tempťrature est considťrťe uniforme
- Calcul des transferts de chaleur entre cellules voisines
- Evolution au cours du temps par calcul d'ťtats successifs sťparťs dans le temps par un "pas de temps" gťnťralement constant
- Valeurs stockťes dans un tableau ŗ 2 indices
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Simulation de l'ťvolution de la tempťrature d'une plaque mťtallique sur laquelle
sont crťťs des points chauds
Exemple d'exťcution
-
Simulation de la surface ocťanique
- ProblŤme en 2 dimensions
- Simulation ŗ base d'ensembles d'ondes sinusoÔdales de longueurs d'onde et amplitudes diffťrentes se dťplaÁant au cours du temps et s'additionnant les unes aux autres

Simulation de surface ocťanique de surface ocťanique
Kit de dťveloppement CUDA (NVidia)
-
Evolution climatique
- Premiers modŤles: ModŤles en deux dimensions
- Surface de la Terre dťcomposťe en longitude et en latitude en un maillage "carrť"
- Informations relatives aux cellules de ce maillage stockťes dans une matrice de variables
- Etude de l'ťvolution du climat en considťrant chaque cellule comme une entitť atomique de caractťristiques uniformes
- ModŤles plus complexes: Trois dimensions

Dťcomposition de l'atmosphŤre en un maillage 2D de plus en plus fin
ces derniŤres annťes avec la disponibilitť d'ordinateurs de plus en plus puissants

Dťcomposition de l'atmosphŤre en un maillage 3D formť de volumes ťlťmentaires
-
Analyse des turbulences dans un fluide 2D
- ProblŤme en deux dimensions
- Rťsolution des ťquations de mťcanique des fluides (Navier-Stockes) complexe et extrÍmement coŻteuse en temps de calcul
Simulation de fluides
Kit de dťveloppement CUDA (NVidia)
-
Analyse des turbulences sur une aile d'avion
- ProblŤme en trois dimensions
- Rťsolution des ťquations de mťcanique des fluides (Navier-Stockes)
- Historiquement, problŤme gťrť en dimension 2 avec simulation numťrique sur des profils 2D de l'objet 3D
- Accroissement de la puissance des ordinateurs -> Passage en 3D avec une aile complŤte
- Maintenant possible de simuler l'ťcoulement sur un avion entier: ailes, volets, fuselage, gouvernes, pylŰnes, rťacteurs, ...

-
ProblŤme des n-corps
- Comment ťvolue un systŤme de n corps sous l'effet des forces de gravitť qu'ils appliquent les uns sur les autres?
-
Pour n masses, 3*n ťquations diffťrentielles du 2Ťme ordre
-> 6*n inconnues



Rťsolution du problŤme des n-corps
Kit de dťveloppement CUDA (NVidia)

Simulations de collisions de galaxies
- Utilisation de matrices pour gťrer les problŤmes de l'informatique fondamentale qui se prťsentent naturellement sous forme 2D
Exemples
-
Les ťcrans d'ordinateur
-
Technologie "raster"
- Une grille rectangulaire de pixels carrťs pour lesquels on peut choisir individuellement la couleur
- "Rťsolution": Nombres de colonnes et de lignes de pixels: 1024x768 -> 768 lignes de 1024 pixels
-
Autre caractťristique de la rťsolution: La "profondeur ťcran"
- Nombre de bits de donnťes affectťs au stockage de la couleur d'un pixel
-
En 24 bits (3 octets), rťpartition en trois "teintes de base" stockťes individuellement sur 8 bits
-> 8 bits (1 octet) de composante rouge, 8 bits (1 octet) de composante verte et 8 bits (1 octet) de composante bleue
-> Dťfinition de chaque composante au moyen d'une valeur entiŤre positive codťe sur un octet (dans l'intervalle [0,255])
-
Couleurs classiques:
- le noir (0,0,0)
- le blanc (255,255,255)
- le rouge saturť (255,0,0)
- le vert saturť (0,255,0)
- le bleu saturť (0,0,255)
- le jaune saturť (255,255,0)
- le cyan saturť (0,255,255)
- le magenta saturť (255,0,255)
-
Autres couleurs: Choix les valeurs "RVB" adťquates
-
Image affichťe ŗ l'ťcran: Une matrice de pixels codťs en couleurs RVB stockťe en mťmoire
- Opťration d'affichage de plus bas-niveau: "Allumer" un pixel avec une couleur particuliŤre
- Autres opťrations implantťes en utilisant cette opťration bas-niveau
-
ParamŤtres nťcessaires ŗ l'appel de fonction d'allumage de pixel:
- Position en x: un entier compris dans l'intervalle [0,rx-1] oý rx est la rťsolution d'affichage en x
- Position en y: un entier compris dans l'intervalle [0,ry-1] oý ry est la rťsolution d'affichage en y
-
Couleur d'affichage
-
"Librairie" de fonctions d'affichage graphique: Un grand nombre de fonctions de gestion de l'affichage en mode graphique et donc
d'ťcriture dans la matrice de pixels:
- Une ou plusieurs fonctions pour configurer la rťsolution d'affichage
- Une ou plusieurs fonctions pour afficher un pixel selon une couleur
-
D'autres fonctions d'affichage plus ťlaborťes:
- Vidage la zone d'affichage avec une couleur (couleur de fond)
- TraÁage de segments de droite
- Remplissage de polygones
- Elimination des parties cachťes
- ...
-
Technologie "raster"

Dessin d'un segment de droite
Dessin d'un arc de cercle

Remplissage d'une facette triangulaire
| Exemple d'affichage graphique bitmap |
-
Deux techniques de stockage d'images dans des fichiers:
- Vectoriel: Images stockťes sous la forme d'objets graphiques de type segment de droite, rectangle, rectangle rempli, cercle, disque, ...
-
Bitmap: Images stockťes sous la forme d'une grille rectangulaire de pixels dťcrits individuellement par une couleur
-
Dťclinaison de ces techniques de diverses maniŤres avec pour consťquence l'apparition de divers formats de fichiers:
- Exemples de formats vectoriels: Postscript (.ps) et SVG (.svg, Scalable Vector Graphic)
-
Exemples de formats bitmap: JPEG, BMP, GIF, PNG
- Compression ou non
- Si compression, perte de qualitť ou non
- Format 8 bits, 24 bits ou 32 bits
-
...
-
Traitement particulier applicable aux images bitmaps: Rťalisation d'opťrations de traitement d'image visant ŗ en changer les caractťristiques:
- Afficher en fausses couleurs
- Augmenter/diminuer la luminositť
- Augmenter/diminuer le contraste
- Flouter
- Extraire les contours
- Nťgativer
-
...
-
Traitement mathťmatique de chaque pixel de la matrice de pixels reprťsentant l'image
-
Calcul de la nouvelle valeur d'un pixel ŗ partir de son ancienne valeur
-> Filtrage spectral -
Calcul de la nouvelle valeur d'un pixel ŗ partir de son ancienne valeur ainsi que des valeurs d'autres pixels (gťnťralement les pixels voisins)
-> Filtrage matriciel
-
Calcul de la nouvelle valeur d'un pixel ŗ partir de son ancienne valeur

Image originale

Image floutťe
Remplacement de chaque pixel par la moyenne de ce pixel et des pixels voisins
Image aprŤs extraction de contours
Gradiant calculť sur les pixels voisins
| Exemple de traitement d'image |
-
Jeu de la vie
- Une grille de boolťens initialisťs ŗ vrai ou ŗ faux
-
Chaque cellule ťvolue en fonction du contenu de ses 8 voisines
- Si 2 voisins ŗ vrai, la cellule ne change pas
- Si 3 voisins ŗ vrai, la cellule passe ŗ vrai
- Dans tous les autres cas, la cellule passe ŗ faux
- Automate cellulaire
- Evolution d'un eco-systŤme
Placement alťatoire -> Stabilisation au bout d'un certain nombre d'ťtapes
Exemple d'exťcution



Evolution cyclique en place: Galaxie
Exemple d'exťcution
Evolution cyclique avec dťplacement rťgulier: Vaisseau
Exemple d'exťcution
- Jeux 2D

Tťtris

Candy Crush