Sujets et Corrections
de TD et TP
![]()
|
Fichier zip |
TD n°1 et 2 : Premičres scčnes OpenGL
Exercice n°1
(1) Programmer en OpenGL la scène suivante sous la forme d'une fonction C sans utiliser les fonctions glPushMatrix et glPopMatrix ailleurs
qu'en début et fin de fonction:
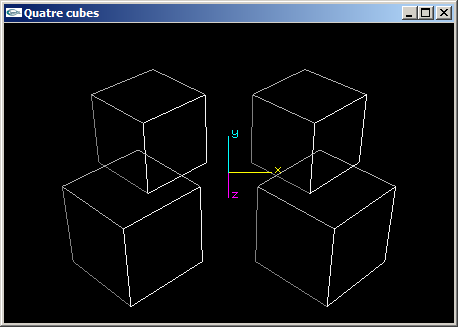
Quatre cubes de coté 2.0 aux positions (2.0,0.0,2.0), (2.0,0.0,-2.0), (-2.0,0.0,2.0) et (-2.0,0.0,-2.0).
(2) Reprogrammer en OpenGL la scène de la question (1) de telle manière que les cubes aient une de leurs faces orientée vers l'origine du repère.
(3) Reprogrammer en OpenGL la scène de la question (2) en utilisant les fonctions glPushMatrix et glPopMatrix pour rendre les objets indépendants les uns des autres et simplifier l'écriture de la fonction scène.

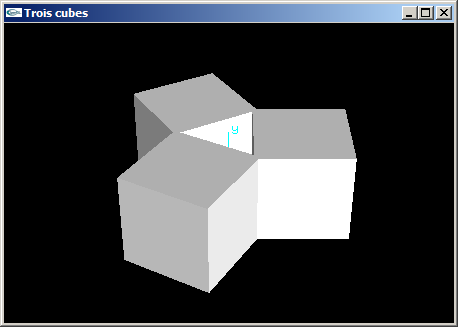
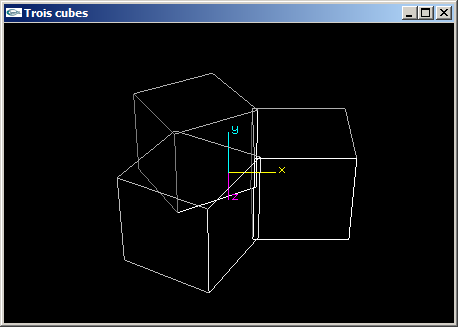
(4) Programmer une scène OpenGL en plaçant 3 cubes de coté 2.0 aux 3 sommets d'un triangle équilatéral défini
avec les caractéristiques suivantes:
- rayon 1.5,
- centré sur l'origine,
- plongé dans le plan xOz.
Les 3 cubes présentent une de leurs faces orientée vers l'origine.
Exercice n°2
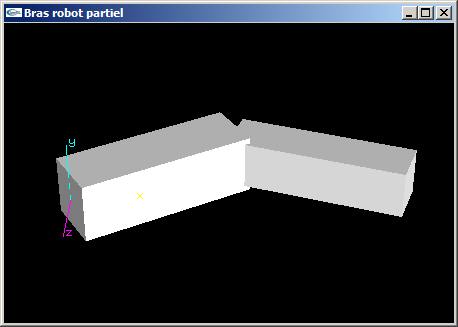
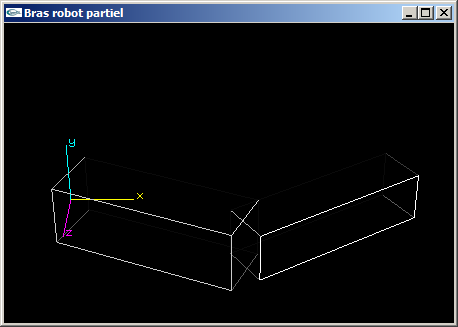
(1) Programmer la scène OpenGL modélisant un bras robot simplifié composé d'un bras et d'un avant-bras.
Le bras est articulé pour que sa base puisse tourner autour de l'axe Oy d'un angle r1. Il s'agit d'un parallélépipède
rectangle de dimension (3.0,1.0,1.0).
L'avant-bras est articulé autour de l'axe y au bout du bras pour un angle r2. Il s'agit d'un parallélépipède
rectangle de dimension (3.0,0.8,0.8).
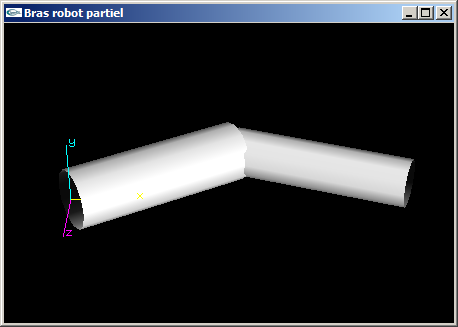
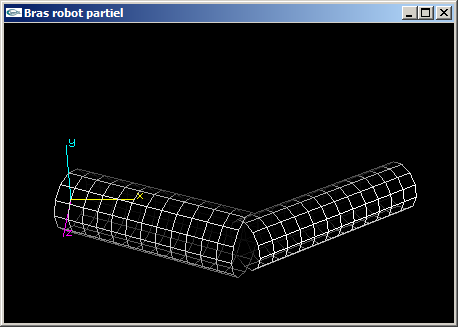
(2) Modifier la fonction OpenGL de l'exercice n°1 en remplaçant les parallélépipèdes par des cylindres de tailles équivalentes ŕ celles des objets qu'ils remplacent.
Exercice 3
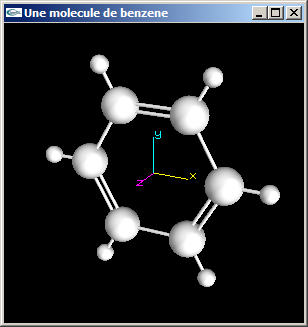
(1) Implanter en OpenGL une fonction de dessin d'une molécule de Benzène (C6H6).
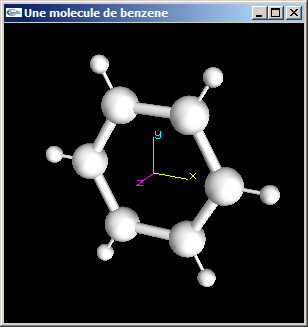
Les atomes de carbone (atomes centraux) ont un rayon égal à 0.5.
Les liaisons entre 2 atomes de carbone ont pour longueur (centre à centre) 2.0 et pour rayon 0.15.
Les atomes d'hydrogène ont un rayon égal à 0.25.
Les liaisons entre atome de carbone et d'hydrogène ont pour longueur (centre à centre) 1.2 et pour rayon 0.05.
La molécule est centrée sur l'origine et placée dans le plan xOy.
(2) Modifier la modélisation de la molécule de benzène de la question précédente pour que les liaisons carbone-carbone
soient alternativement des liaisons simples et des liaisons doubles (voir figure ci-dessous).
Les cylindres modélisant ces liaisons auront pour rayon 0.05 (comme les liaisons carbone-hydrogène). Dans le cas des liaisons doubles,
les deux cylindres de modélisation seront écartés de 0.1.
Solutions
| Quatre cubes (Question 3) |
| Trois cubes |
| Bras robot avec parallélépipèdes |
| Bras robot avec cylindres |
| Molécule de benzène |
![]()
TP n°1 : Premičres implantations OpenGL
Exercice n°1
Télécharger le fichier archive IG-2018-2019.zip. Ce fichier archive contient une "solution" Visual Studio
2015.
Aprčs extraction, un répertoire IG-2018-2019 est créé. Ce répertoire contient lui-męme 6 répertoires:
- Bin pour les exécutables,
- Include pour les fichiers d'entęte OpenGL (fichiers non présents dans Visual Studio),
- Lib pour les fichiers librairie OpenGL (fichiers non présents dans Visual Studio),
- Projet pour le fichier de description de la solution (Projet.sln) et les répertoires contenant les projets faisant partie de la solution
(Un seul répertoire actuellement: Exemple),
- Src pour les fichiers source des projets inclus dans la solution,
- Temp pour les fichiers temporaires (solution, compilation, ...).
La solution comprend un seul projet nommé Exemple. Ce projet référence un seul fichier source Exemple.cpp et est configuré pour une compilation utilisant
OpenGL:
- fichiers d'entęte (répertoire implicite ../../Include),
- fichiers librairie: OpenGL32.ms.lib et glu32.ms.lib dans les options de configuration GUI et glut32.ms.lib par référence directe,
- copie de l'exécutable dans le répertoire Bin.
La compilation (génération) de ce projet doit conduire ŕ la création d'un exécutable nommé Exemple.exe dans le répertoire Bin. Son exécution
requičre les dll OpenGL32.dll et Glu32.dll (toujours présentes par défaut dans le systčme d'exploitation Windows) ainsi que la dll Glut32.dll
(jamais présente par défaut dans le systčme d'exploitation Windows mais dont il existe une copie dans le répertoire Bin oů est copié l'exécutable).
(1) Extraire l'archive IG-2018-2019.zip. Lancer Visual Studio 2015 et charger la solution. Vérifier la compilation et l'exécution du projet Exemple.
(2) Implanter la question (3) de l'exercice n°1 du TD n°1. On pourra directement modifier le fichier Exemple.cpp de la question précédente pour y intégrer le code de génération de la scčne.
(3) Implanter la question (4) de l'exercice n°1 du TD n°1.
Solutions


![]()
TP n°1 : GLUt
Le fichier code source GLUtMinimum.cpp illustre le fonctionnement événementiel de la librairie GLUt. On rappelle que nous allons utiliser cette librairie annexe pour construire l'interface utilisateur de nos programmes OpenGL, celui-ci ne contenant aucune fonction dédiée ŕ cette fin.
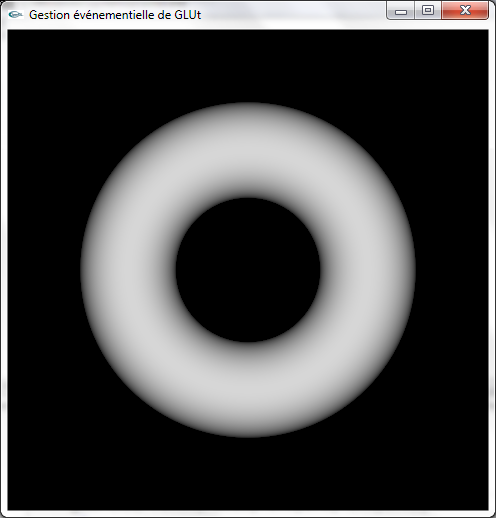
Le fichier source GLUtMinimum.cpp contient le minimum d'appels ŕ OpenGL de façon ŕ mettre en évidence
les fonctionnalités GLUt et non les fonctionnalités OpenGL. La scčne construite est constituée d'un unique tore. Le calcul d'illumination
est activé et une seule lumičre est allumée. L'élimination des parties cachées est activée. La projection est réalisée en projection orthographique.
Le contenu du volume cubique dont la diagonale est définie par les positions (-1.0,-1.0,-1.0) et (1.0,1.0,1.0) du repčre de modélisation est affiché
dans le viewport de visualisation en projection selon l'axe -z du repčre de modélisation. Le viewport de visualisation est configuré pour occuper
automatiquement (dynamiquement) l'intégralité de la fenętre.
La fonction main organise les points suivants:
- exécution d'une fonction (static void clean(void)) lorsque l'application est interrompue par exécution de la fonction exit,
- configuration et création de la fenętre de visualisation,
- configuration des paramčtres OpenGL qui doivent l'ętre et qui n'auront pas ŕ ętre reconfigurés au cours de la vie du programme,
- programmation de la gestion des événements,
- affichage de la fenętre de visualisation et lancement de la boucle infini de gestion des événements.
Les événements suivants sont gérés "normalement":
- rafraichissement de la fenętre de dessin (display),
- modification de la taille de la fenętre de dessin (reshape).
Les événements suivants sont gérés a minima par affichages écran texte:
- frappe d'une touche alphanumérique du clavier (keyboard),
- frappe d'une touche non-alphanumérique du clavier (special),
- clic souris dans la fenętre de dessin (mouse),
- déplacement de la souris bouton appuyé dans la fenętre de dessin (mouseMotion).
Le code de gestion des événements suivants est programmé pour une gestion a minima par affichages écran texte, mais ces événements ne sont activés
(lignes laissées en commentaire) dans la fonction main:
- aucun événement n'est en attente (idle),
- déplacement de la souris bouton non appuyé devant la fenętre de dessin (passiveMouseMotion).
Le fichier GLUt-3-spec.pdf contient la documentation de référence de GLUt. Il pourra vous aider ŕ implanter les réponses aux questions suivantes.
a) Implanter un contrôle clavier permettant de switcher entre les modes d'affichage plein et fil de fer en utilisant la touche de clavier Espace.
b) Implanter une animation telle que le tore tourne sur lui-męme autour de l'axe x ŕ raison de 1° de rotation entre chaque image.
c) Implanter un contrôle clavier permettant d'activer/désactiver l'animation au moyen de la touche Entrée.
d) Implanter un contrôle clavier permettant de faire tourner le tore sur lui-męme autour de l'axe y dans un sens ou dans l'autre en utilisant les touches Flčche gauche et Flčche droite.
e) Implanter un contrôle clavier permettant de passer l'affichage en mode plein écran en utilisant les touches de clavier 'f' ou 'F'.
f) Implanter un contrôle souris permettant d'inverser le sens de rotation de l'animation par clic du bouton droit de la souris dans la fenętre de dessin.
g) Corriger le problčme de déformation de la scčne lorsque la dimension de la fenętre est changée par l'utilisateur vers des valeurs différentes de résolutions en x et en y.
|
GLUT |
||
|
Fonctionnalités principales de GLUt: - création de fenętres - gestion des événements : - fenętre, - clavier, - souris |
|
|
![]()
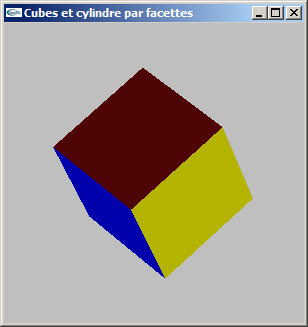
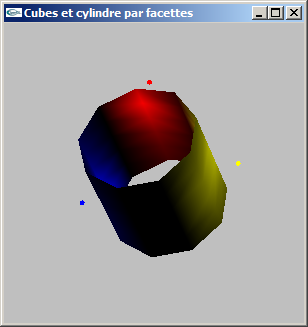
TD n°3 : Modélisation par facettes
Exercice n°1
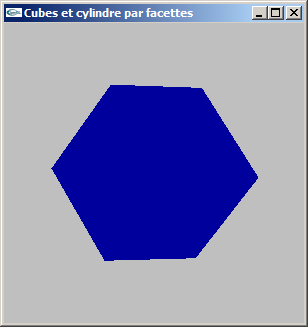
(1) Modéliser par facettes un cube de coté c centré sur l'origine du repère de modélisation. On ne générera
pas les normales.
La fonction créée aura pour prototype:
void mySolidCube(double c);
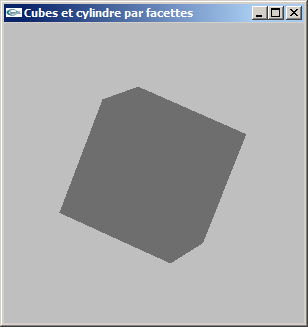
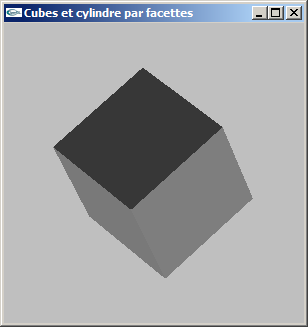
(2) Modifier la modélisation de la question précédente pour ajouter la gestion des normales.
Le but est de rendre possible les calculs d'éclairage.
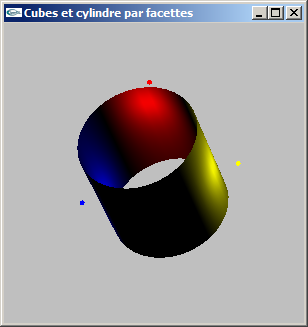
Modéliser par facettes un cylindre selon les caractéristiques suivantes:
- choix du rayon,
- choix de la hauteur,
- choix du nombre de facettes en découpage longitudinal pour une valeur entière ns,
- centré sur l'origine du repère de modélisation,
- axé selon y.
On ne modélisera pas les bases du cylindre, mais uniquement le tube.
La fonction créée aura pour prototype:
void mySolidCylindre(double hauteur, double rayon, int ns);
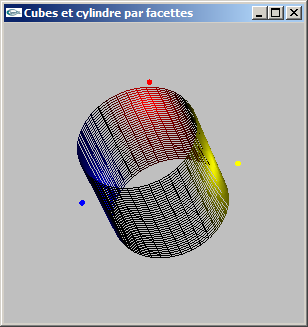
Question supplémentaire: Ajouter un découpage latéral (selon l'axe y) pour une valeur nl.
Le prototype de la fonction devient:
void mySolidCylindre(double hauteur, double rayon, int ns, int nl);
Solutions
![]()
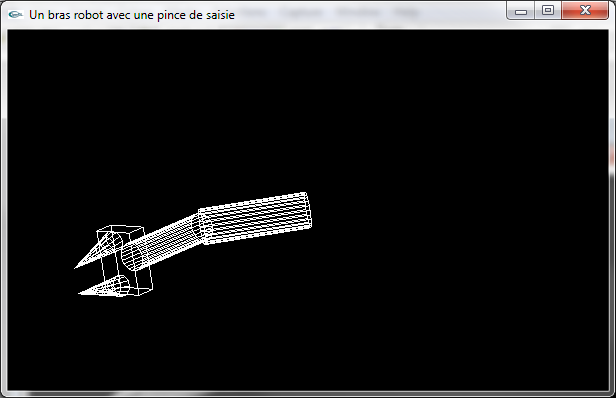
TP n°3 : Modélisation géométrique
(1) Implanter l'exercice n°2 du TD n°1 en version "parallélépipčdes" et en version "cylindres". On utilisera la fonction de modélisation de cylindre développée au cours du TD n°3.
(2) Ajouter les contrôles clavier permettant de faire varier les angles de rotation de l'avant-bras et du bras. Exemple: Up/Down pour changer l'angle r1 par incrément de 1.0° et Page up/Page down pour changer l'angle r2 par incrément de 1.0°.
(3) Ajouter au bras robot une "pince robot" formée de deux mandibules modélisées par des cones. En dehors du fait d'utiliser des cones pour les mandibules, vous ętes libre de définir votre pince comme vous le souhaitez (objets canoniques de modélisation, taille(s) de ces objets, ...)
(4) Ajouter les contrôles clavier permettant d'ouvrir/fermer la pince et de la faire tourner sur elle-męme au bout du bras robot autour de l'axe du bras. Exemple: Right/Left pour changer l'angle de rotation de la pince par incrément de 1.0° et +/- pour ouvrir/fermer la pince.

Solutions
![]()
TD n°4 : Paramčtrage numérique de caméras
a) On considčre une caméra de visualisation en projection parallčle orthographique placée en position (0.0, 0.0, 0.0) orientée selon l'axe (0.0,
0.0, -1.0). On considčre une scčne centrée sur le point de coordonnées (0.0, 0.0, -100.0) et occupant un volume circulaire de rayon 10.0.
Quelle ouverture doit-on donner ŕ cette caméra pour visualiser cette scčne en gros plan dans une fenętre d'affichage carrée (viewport carré)?
Définir le paramétrage numérique de la fonction OpenGL utilisée pour réaliser cette visualisation: glOrtho.
b) On considčre une caméra de visualisation en projection en perspective placée en position (0.0, 0.0, 0.0) orientée selon l'axe (0.0, 0.0, -1.0).
On considčre une scčne centrée sur le point de coordonnées (0.0, 0.0, -100.0) et occupant un volume circulaire de rayon 10.0.
Quelle ouverture doit-on donner ŕ cette caméra pour visualiser cette scčne en gros plan dans une fenętre d'affichage carrée (viewport carré)?
Définir le paramétrage numérique de la fonction OpenGL utilisée pour réaliser cette visualisation: gluPerspective.
c) Dans le cadre d'une implantation OpenGL, décrire une solution permettant de s'assurer que l'intégralité de la scčne sera visualisée quel que soit le ratio résolution horizontale sur résolution verticale adopté par le viewport d'affichage.
Solutions
![]()
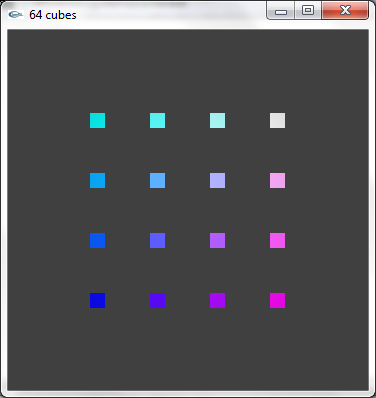
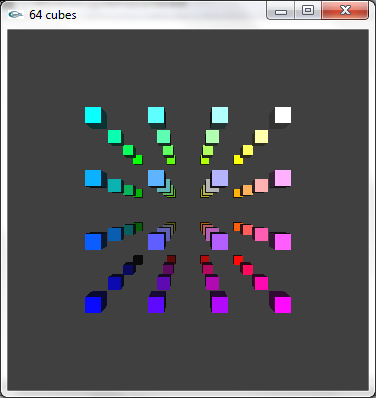
TP n°4 : Caméras virtuelles
Le fichier code source ParametrageCamera.cpp contient un programme C+OpenGL complet réalisant
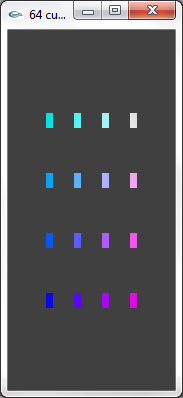
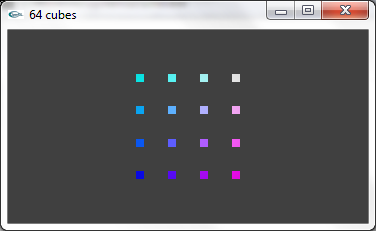
la modélisation géométrique d'une scčne et organisant son affichage écran. Cette scčne est constituée de 64 cubes de coté 0.5 placés en 4 plans
de 4x4 cubes de façon ŕ occuper un volume cubique de coté 7.0 centré sur l'origine du repčre de modélisation. Les cubes sont colorés en fonction
de leur position dans la scčne. L'affichage est réalisé en projection parallčle orthographique de façon ŕ ce que l'intégralité de la zone
d'affichage de la fenętre soit utilisée pour le viewport OpenGL. On rappelle que la direction de visualisation est la direction -z.
Télécharger et compiler ce fichier. Vérifier la bonne exécution de l'exécutable ainsi obtenu.
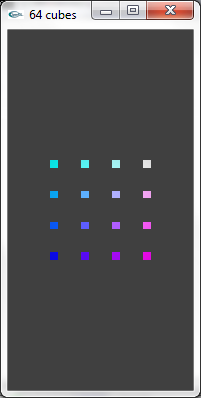
a) Lorsque la fenętre de visualisation est modifiée par l'utilisateur pour adopter une résolution en x différente de la résolution en y, les objets affichés sont déformés.
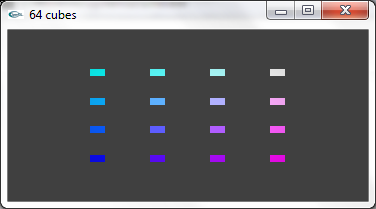
Résoudre ce problčme de façon que cette déformation disparaisse et que la scčne reste intégralement visible quel que soit le ratio résolution en x / résolution en y.
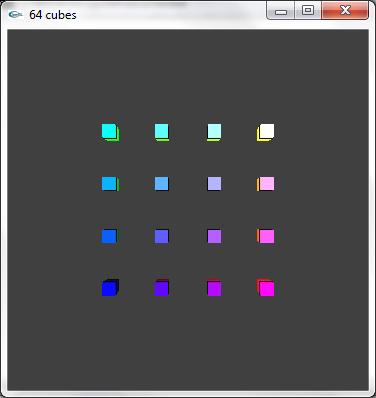
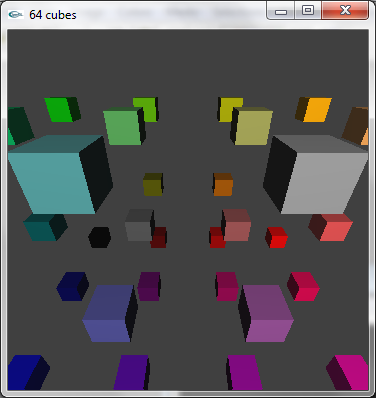
b) Modifier le code source pour que l'affichage ne soit plus réalisé en projection parallčle orthographique mais en projection en perspective.
On placera la caméra virtuelle en position (0.0,0.0,100.0). On l'orientera de façon qu'elle regarde l'origine du repčre de modélisation
(sur laquelle la scčne est centrée). On choisira la direction y comme direction de la verticale.
Il convient ici d'utiliser la fonction gluPerspective ŕ la place de la fonction glOrtho (dans la fonction reshape) et d'ajouter un appel
ŕ la fonction gluLookAt dans la fonction display en plaçant cet appel juste avant l'appel ŕ la fonction scene de façon que les coordonnées spécifiées
en paramčtres de gluLookAt soient considérées dans le męme repčre que celui associé ŕ la scčne, ŕ savoir le repčre de modélisation. On choisira les
paramčtres d'appel du gluPerspective et du gluLookAt de façon réfléchie (autant que possible pas d'essai "pour voir"). Rappel :
Les paramčtres d'appel de ces deux fonctions sont généralement liés.
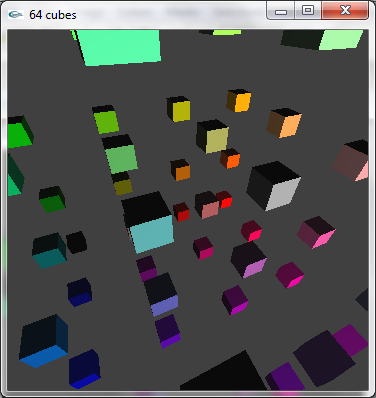
c) Modifier une nouvelle fois le code source pour que la caméra virtuelle soit maintenant placée en position (0.0,0.0,10.0).

d) Modifier une derničre fois le code source pour qu'il soit possible de contrôler la position de la caméra en utilisant le clavier:
- Up et Down pour la déplacer en y,
- Right et Left pour la déplacer en x,
- Page up et Page down pour la déplacer en z.
Elle reste orientée vers l'origine du repčre de modélisation.

Question supplémentaire: On a placé l'appel ŕ gluLookAt entre les appels aux fonctions glLightfv et scene. Déplacer l'appel ŕ gluLookAt juste avant l'appel ŕ glLightfv et tester le programme ainsi obtenu. La scčne affichée est géométriquement identique mais les couleurs issus des calculs d'éclairage sont différents. Pourquoi?

Solutions
|
GLUT |
||
| Parametrage d'une caméra OpenGL (a) |
|
|
| Parametrage d'une caméra OpenGL (b) |
|
|
| Parametrage d'une caméra OpenGL (c) |
|
|
| Parametrage d'une caméra OpenGL (d) |
|
|
![]()
TP n°5 : Plaçage de texture
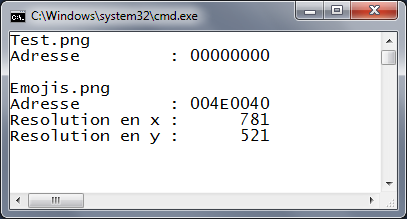
L'archive zip ChargementImagePNG.zip contient les fichiers "code source" d'une librairie de gestion de fichiers "image" au format png accompagnés d'un exemple d'utilisation sous la forme d'une fonction main tentant deux chargements d'image successifs : Test.png et Emojis.png.
Plus précisément, une fonction d'importation et une fonction d'exportation sont décrites dans le fichier
ChargePngFile.h.
La fonction d'importation prend en paramčtre le nom du fichier ŕ importer et deux pointeurs sur entier destinés ŕ récupérer la résolution en
x et la résolution en y de l'image importée. Elle retourne un pointeur sur unsigned char correspondant au tableau d'octets issu de l'importation
(NULL si échec). Le tableau retourné est alloué dynamiquement par malloc et se doit d'ętre libéré par free aprčs utilisation. Il contient les
composantes RVB des pixels codées sur 8 bits (1 octet) et entrelacées dans l'ordre rouge, vert, bleu si le fichier image importé était un fichier
au format png 24 bits entrelacé.
a) Télécharger et désarchiver ce fichier zip.
- Windows : Ouvrir la solution Visual Studio accompagnant les fichiers source. Compiler, exécuter et vérifier la bonne exécution de l'exécutable
obtenu.
- Linux : Ne conserver que le fichiers source c, cpp et h dans leurs répertoires respectifs ainsi que le fichier Emojis.png présent dans le
répertoire bin. Au moyen du gestionnaire de projet de développement que vous avez l'habitude d'utiliser, créer un projet incluant l'ensemble
des fichiers c et cpp fournis et générant l'exécutable dans le répertoire bin. Compiler, exécuter et vérifier la bonne exécution de l'exécutable
obtenu.
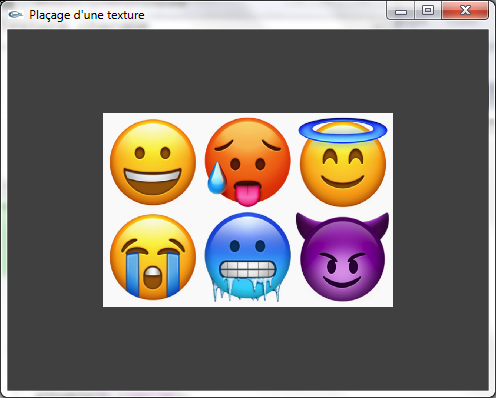
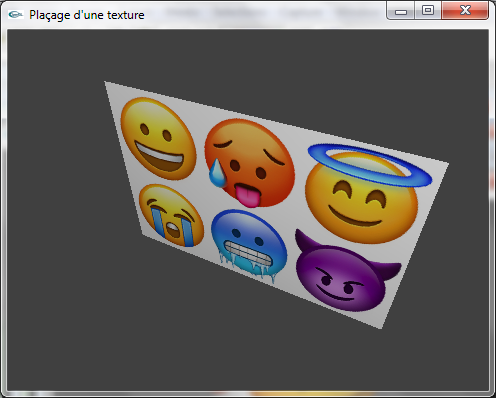
b) Développer un programme OpenGL permettant d'afficher une scéne composée d'un rectangle de coté 7.5 x 5.0. On pourra utiliser comme base le code développé au cours du TP n°4.

c) Modifier le code source de la question (b) pour que le rectangle soit muni d'une texture le recouvrant entičrement utilisant l'image contenue dans le fichier Emojis.png.
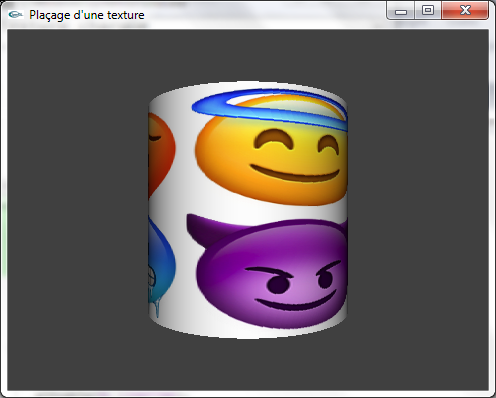
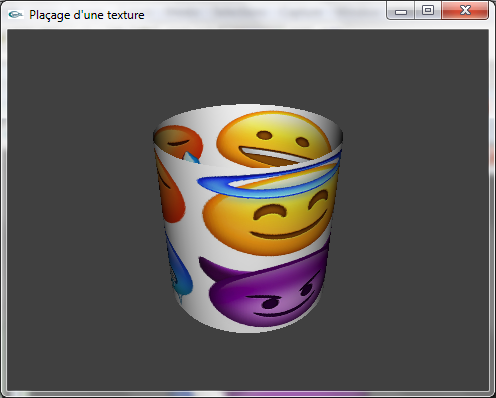
d) Reprendre la fonction de modélisation de cylindre de l'exercice n°2 du TD n°3 pour y ajouter les instructions permettant de le recouvrir d'une texture. Dans le programme de la question (c), remplacer le rectangle par un cylindre de hauteur 5.0 et de rayon 2.5.
Solutions
|
GLUT |
||
| Plaçage de texture |
|
|
Utiliser plusieurs textures
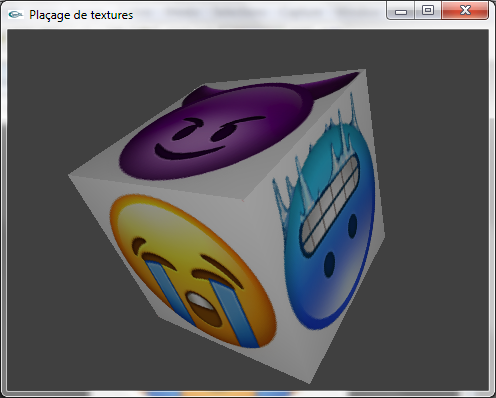
Les programmes ci-dessous montrent l'utilisation de plusieurs textures pour dessiner un cube oů chacune des 6 faces est texturée au moyen d'une
image différente de celles des 5 autres faces.
Le premier programme est une simple adaptation du programme de la question (c). Le second programme montre comment installer les textures en mémoire
graphique au cours d'une premičre phase pour ensuite les utiliser ŕ la demande de façon rapide.
|
GLUT |
||
| Plaçage de textures multiples (chargement ŕ la demande) |
|
|
| Plaçage de textures multiples (chargement préalable) |
|
|
![]()
Epreuve n°1 : Modélisation géométrique
Question 1
a) 6 types de surfaces existent : GL_POLYGON, GL_TRIANGLES, GL_QUADS, GL_TRIANGLE_STRIP, GL_TRIANGLE_FAN et GL_QUAD_STRIP.
b) Les normales étant utilisées pour les calculs d'éclairage, celles-ci doivent impérativement ętre spécifiées pour que ceux-ci s'opérent correctement.
Question 2
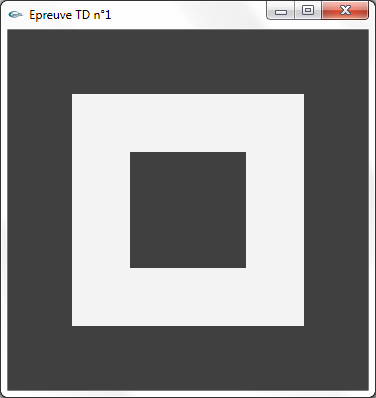
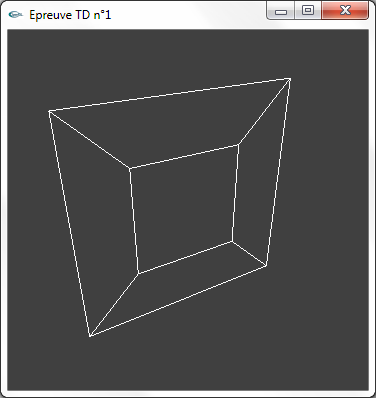
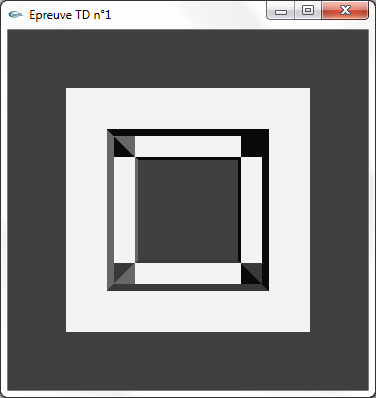
La façon la plus simple de modéliser la facette carrée trouée demandée consiste ŕ utiliser un GL_QUAD_STRIP formé de 4 quadrilatčres (10 vertices). Les bords du GL_QUAD_STRIP sont constitués des bords intérieurs et extérieurs. Les arętes de recollement sont constituées des "diagonales" de la facette trouée. Les deux premiers et deux derniers vertices sont identiques de façon ŕ fermer le GL_QUAD_STRIP.
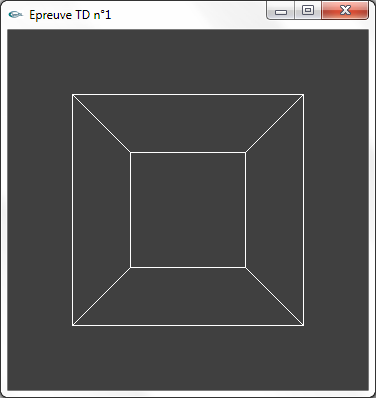
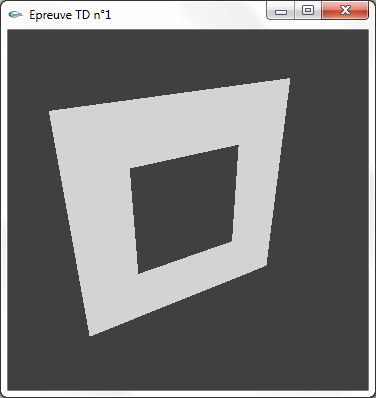
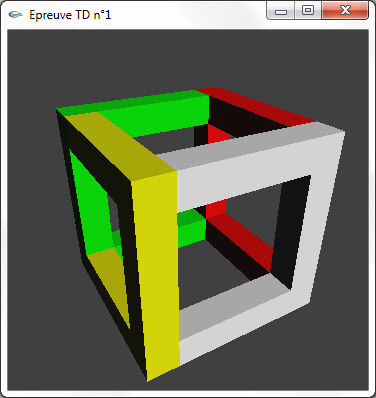
Question 3
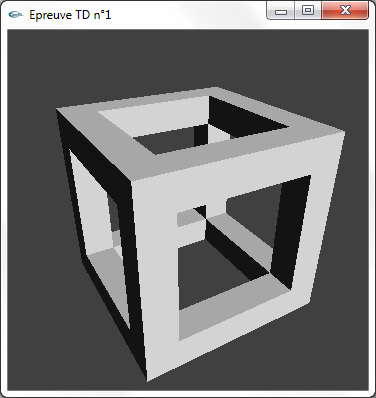
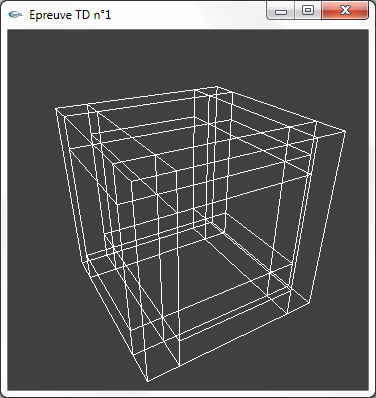
Le cube schématisé est constitué de 12 "boites" parallélépipédiques rectangulaires. Une recherche des éléments pouvant ętre reproduits permet de déterminer qu'une structure en U formée de 3 boites peut ętre générée 4 fois avec une rotation de 90° entre chaque instanciation. Une fonction est donc développée pour modéliser cette structure. Pour faciliter la modélisation des boites, on aura intéręt ŕ créer une fonction ad hoc avec passage en paramčtres des largeur, hauteur et profondeur.
Solutions
|
GLUT |
||
| Epreuve de TD n°1 |
|
|
![]()
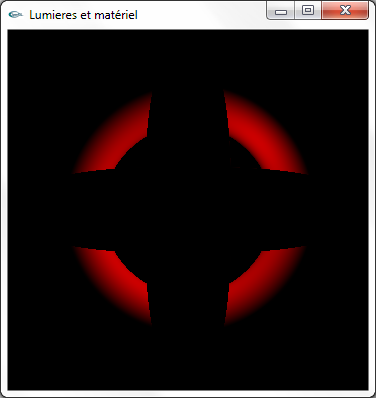
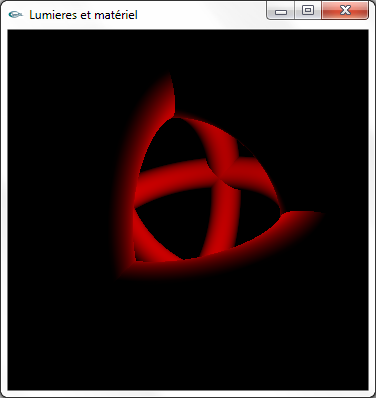
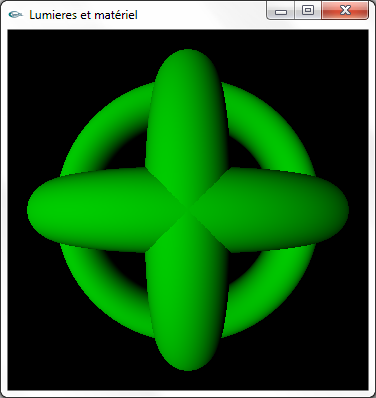
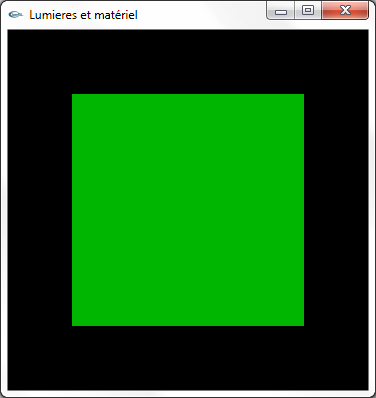
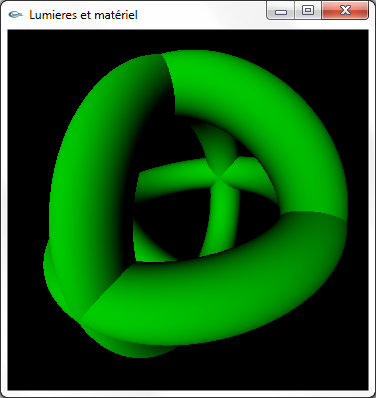
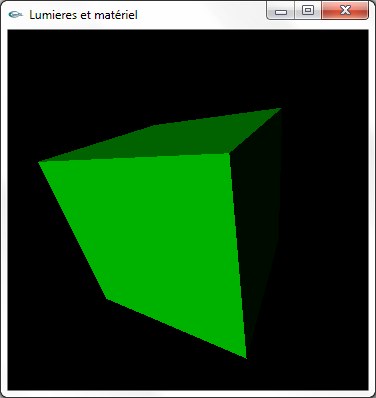
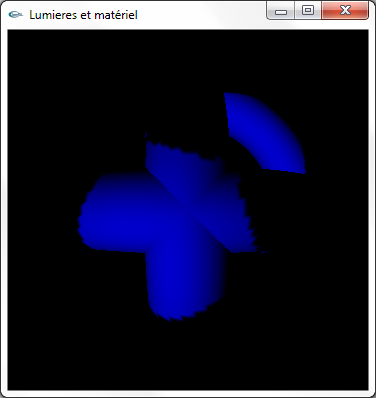
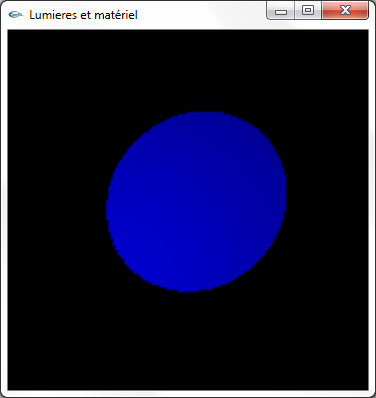
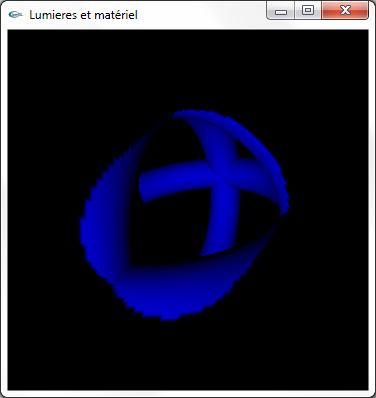
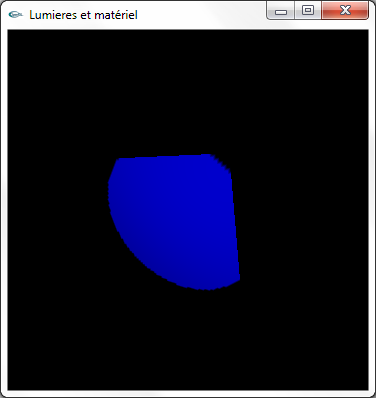
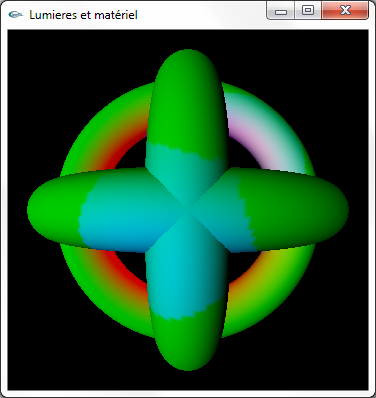
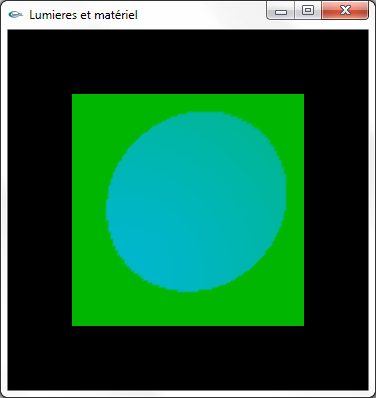
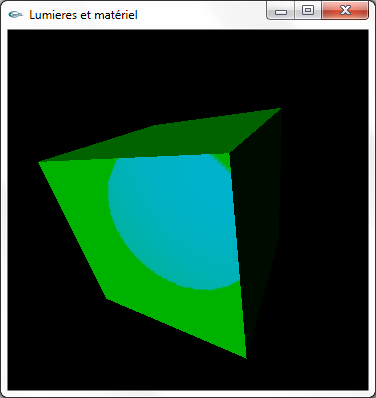
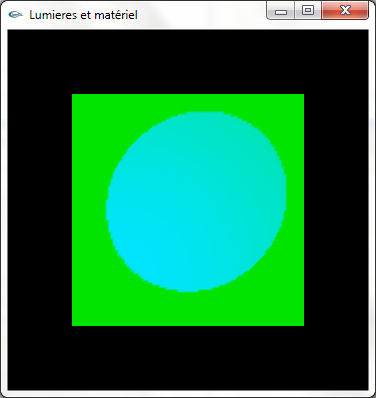
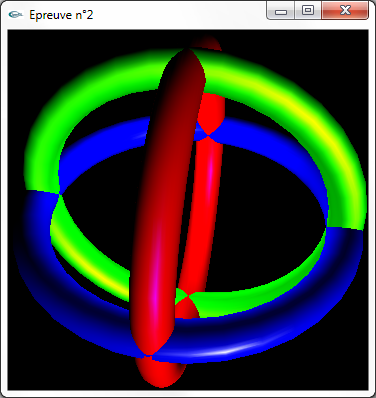
TP n°6 : Lumičres et matériaux
Le fichier source LumieresEtMaterielBase.cpp implante un programme d'affichage OpenGL
dans lequel, ŕ l'exception d'une, toutes les instructions spécifiques ŕ la gestion des matériaux et des lumičres ont été omises. L'instruction
conservée se trouve dans la fonction init. Elle a pour but de supprimer (configurer ŕ noir) la lumičre ambiante existant par défaut au sein d'OpenGL
(configurée ŕ (0.2,0.2,0.2,1.0)) en plus des lumičres classiques (GL_LIGHT0 ŕ GL_LIGHT7).
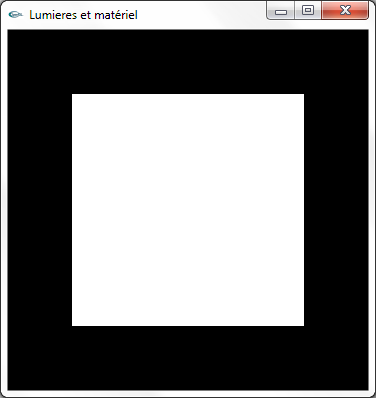
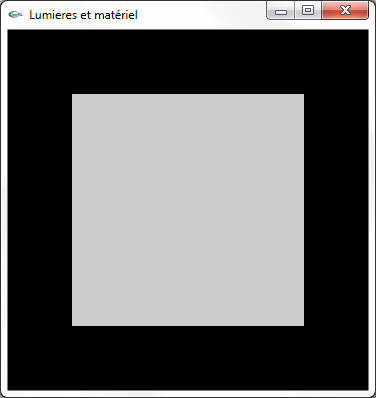
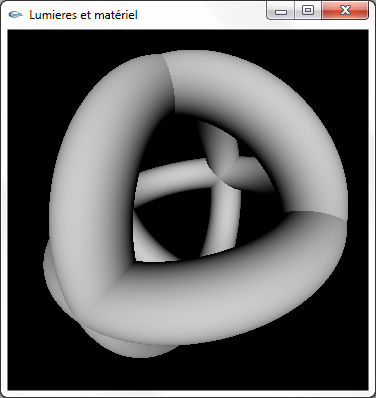
Ce programme implante la modélisation géométrique de deux scčnes. La premičre est composée de 3 tores. La seconde ne comporte qu'un cube. On
notera toutefois que, dans le but d'améliorer les calculs d'illumination, le cube est modélisé de façon ŕ intégrer une décomposition de chacune
des 6 faces en un maillage de 100x100 facettes élémentaires carrées. La touche 's' permet de switcher entre les deux scčnes. La touche Espace
permet de switcher entre les modes d'affichage plein et fil de fer.
Ce programme implante une fonctionnalité d'animation de la scčne par rotation autour d'elle-męme. Cette animation peut ętre activée/désactivé
au moyen de la touche 'a'. La touche F2 permet de ramener la scčne ŕ sa configuration de rotation initiale.
Ce programme intčgre des appels ŕ des fonctions actuellement vides destinées ŕ isoler les portions de code OpenGL dédiées ŕ la configuration des
lumičres et des matériaux utilisés :
- static void configurationLumieres(void) : configuration des lumičres,
- static void configurationMaterielTore1(void) : configuration du matériel du premier tore,
- static void configurationMaterielTore2(void) : configuration du matériel du deuxičme tore,
- static void configurationMaterielTore3(void) : configuration du matériel du troisičme tore,
- static void configurationMaterielCube(void) : configuration du matériel du cube.
A noter : Dans la fonction display, les fonctions OpenGL glPushAttrib et glPopAttrib sont utilisées pour sauvegarder dans une pile ad hoc et restaurer de façon rapide l'intégralité de la configuration des lumičres et du matériel. Le paramčtre de glPushAttrib dédié ŕ cette sauvegarde est GL_LIGHTING_BIT.
Le but du TP consiste ŕ placer les instructions de configuration des calculs d'illumination dans le respect des questions posées.
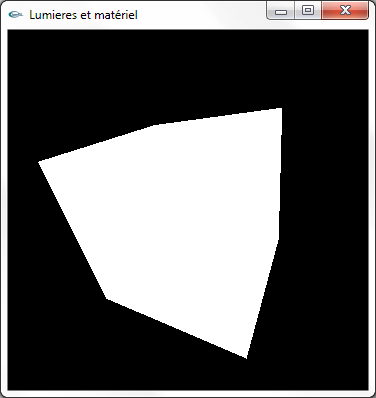
a) Activer l'utilisation des calculs d'éclairage.

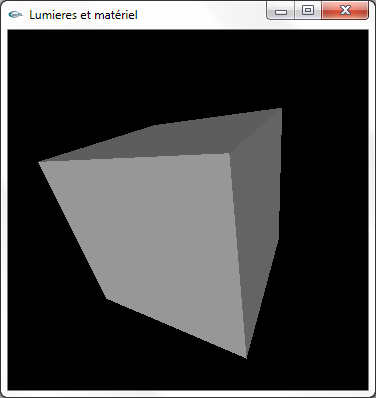
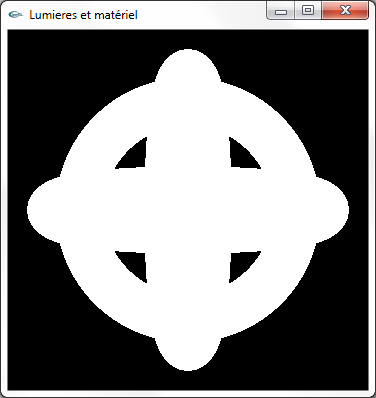
b) Activer et configurer la lumičre 0 selon les caractéristiques suivantes:
- Lumičre ponctuelle placée en position (2.0,2.0,2.0)
- Emission diffuse rouge
- Pas d'émission spéculaire
- Pas d'émission ambiante
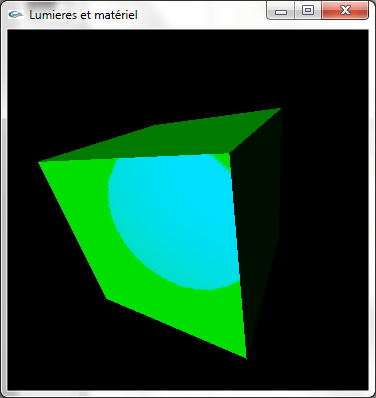
c) Désactiver la lumičre 0. Activer et configurer la lumičre 1 selon les caractéristiques suivantes:
- Lumičre directionnelle de direction d'incidence (-2.0,0.0,4.0)
- Emission diffuse verte
- Emission spéculaire blanche
- Pas d'émission ambiante
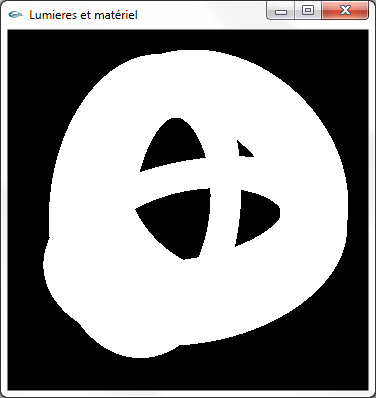
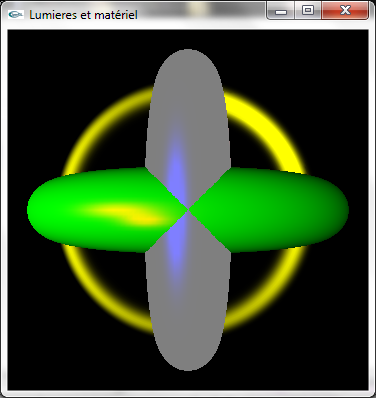
d) Désactiver la lumičre 1. Activer et configurer la lumičre 2 selon les caractéristiques suivantes:
- Spot placé en position (-2.0,-2.0, 10.0) et de direction d'éclairage (3.0, 3.0,-10.0)
- Spot d'ouverture globale égale ŕ 40°
- Emission diffuse bleue
- Emission spéculaire jaune
- Pas d'émission ambiante
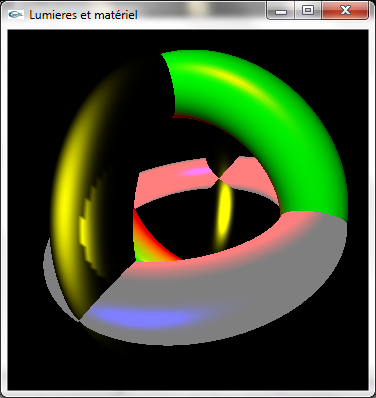
e) Activer simultanément les lumičres 0, 1 et 2.

f) On aura remarqué que les émissions spéculaires des questions (c) et (d) semblent ne pas produire de résultat ŕ l'écran. Ceci s'explique
par le fait que le matériel par défaut d'OpenGL ne génčre pas de réponse ŕ ce type d'éclairage.
Configurer le matériel des tores et du cube pour qu'il génčre une réponse spéculaire blanche avec une réflectivité de 64.0 (valeur intermédiaire
entre les valeurs générant les réponses maximales et minimales : 0.0 et 128.0).

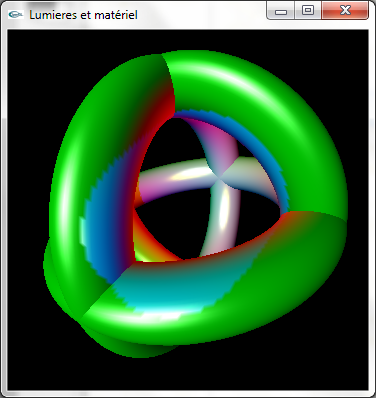
g) Modifier le matériel des tores selon les caractéristiques suivantes:
- Tore n°1: pas de réflexion diffuse, réflexion spéculaire jaune, réflectivité de 15.0, pas de réflexion ambiante, pas d'émission
- Tore n°2: réflexion diffuse jaune, réflexion spéculaire rouge, réflectivité de 100.0, pas de réflexion ambiante, pas d'émission
- Tore n°3: réflexion diffuse rouge, réflexion spéculaire bleue, réflectivité de 64.0, pas de réflexion ambiante, émission grise (gris moyen)
Questions supplémentaires
1) Tester la possibilité offerte par OpenGL de créer des lumičres ponctuelle ou spot intégrant une atténuation de l'éclairage fonction de la
distance entre la lumičre et le point qu'elle éclaire : atténuation linéaire, atténuation quadratique.
Rappel : par défaut, il n'y a pas d'atténuation pour ces deux types de lumičres.
2) Réaliser une animation oů les lumičres tournent autour de l'origine et la scčne reste immobile.
3) Tester l'influence du nombre de facettes de modélisation sur les éclairages et la vitesse d'animation.
4) Tester l'utilisation de valeurs supérieures ŕ 1.0 pour les coefficients des "couleurs" pour les lumičres et les matériels.
Rappel : Utiliser des coefficients numériques supérieurs ŕ 1.0 est tout ŕ fait admis pour les lumičres (notion d'énergie). Ce n'est pas le
cas pour les matériels.
Solutions
|
GLUT |
||
| Lumičres et matériel |
|
|
![]()
TP n°7 : Lancement du projet
Description du travail ŕ réaliser
De façon ŕ faciliter le développement du projet, réaliser le test des deux fichiers sources suivants:
- DeuxFenetres.cpp
- TestMemoire.cpp
Le fichier DeuxFenetres.cpp illustre la possibilité offerte par GLUt de gérer plusieurs fenętres d'affichage OpenGL. La fonction int glutCreateWindow(void) permet de créer les fenętres. Elle retourne un handle entier ŕ mémoriser permettant de garder une référence sur chaque fenętre ouverte. Les fenętres sont individuellement munies de leurs fonctions display, reshape, keyboard, special, mouse, ... qui permettent de gérer leur fonctionnement événementiel. Attention, les fenętres partagent une et une seule fonction idle. Chaque fenętre peut recevoir en propre un ordre de rafraichissement en utilisant la fonction void glutPostWindowRedisplay(int f) oů f est le handle de la fenętre ŕ rafraîchir. Dans chaque fenętre est géré un environnement OpenGL complet pouvant ętre intégralement paramétré : lumičres, matériaux, textures, caméra, options d'affichage, ...
Le fichier TestMemoire.cpp montre une technique spécifique ŕ VisualStudio permettant de contrôler les opérations de gestion dynamique de la mémoire
: new, delete, calloc, malloc, free,... Le but de cette technique est de faciliter la détection des problčmes souvent constatés : double free ou
delete, pas de free pour un *alloc, pas de delete pour un new, ... Il s'agit d'un équivalent ŕ valgrind. Attention, les bibliothčques de
compatibilté mfc doivent ętre installées (option non activée par défaut au moment de l'installation de VisualStudio) pour que TestMemoire.cpp
puisse ętre compilé et donc exécuté.
Pour que le contrôle soit réalisé, il est nécessaire que la compilation soit réalisée en mode "Debug" et que l'exécution soit lancée
sous debugger. Les directives de compilation incluses dans le code source font que la compilation et l'exécution sont possibles sans problčme
en mode release ou bien si un autre compilateur que VisualStudio est utilisé. Le code est instrumenté au début avec un certain nombre de #include
et dans la fonction main avec les lignes suivantes :
#if defined(WIN32) || defined(WIN64)
#if defined(_DEBUG)
_CrtSetDbgFlag ( _CRTDBG_ALLOC_MEM_DF | _CRTDBG_LEAK_CHECK_DF );
_crtBreakAlloc = 120;
#endif
#endif
qui configurent l'outil d'analyse
(1) pour qu'ŕ la fin d'exécution du programme sous debugger un rapport de l'utilisation dynamique de la mémoire soit établi et affiché
dans la fenętre "Sortie" de Visual Studio,
(2) pour qu'un point d'arręt pour le debugger soit placé lors de la 120čme opération d'allocation dynamique de mémoire (new, malloc,
calloc, ...).
Si on ne souhaite pas qu'un point d'arręt soit réalisé, on pourra placer la ligne en commentaire.
La fenętre de VisualStudio nommée "Pile des appels" permet de savoir oů le point d'arręt a été déclenché par le debugger.
a) Corriger le problčme mémoire existant dans TestMemoire.cpp.
b) Ajouter une troisičme fenętre permettant de visualiser la scčne depuis un 3čme point de vue (au choix).
![]()
Epreuve n°2 : Caméras virtuelles
1a) Une projection parallčle orthographique est une projection planaire (plan de projection plan) caractérisée par le fait que la projection de chaque objet sur le plan de projection est réalisée selon un vecteur (une direction) unique et que ce vecteur projection unique est orthogonal au plan de projection.
1b) Non exhaustivement :
- Les parallélismes existant dans la scčne réelle sont retrouvés dans la scčne affichée.
- La taille des objets affichés ne dépend pas de leur position dans la scčne.
-> Tous les objets de męme taille ont la męme taille ŕ l'écran.
-> On peut utiliser la taille d'un objet ŕ l'écran pour se faire une idée de sa taille réelle.
-> On ne peut pas utiliser la taille d'un objet ŕ l'écran pour se faire une idée de sa distance et donc de sa profondeur
et de sa place dans la scčne.
Ces propriétés sont appropriées aux situations d'affichage oů la taille des objets doit ętre facilement interprétée ŕ partir de leurs tailles
ŕ l'écran, oů l'interprétation de la distance aux objets n'est pas nécessaire et oů les parallélismes doivent ętre conservés. Exemple
: dans un logiciel de modélisation géométrique.
1c) La fonction OpenGL dédiée ŕ la configuration d'une projection parallčle orthographique est la fonction
void glOrtho(double xGauche,double xDroit,double yInferieur,double ySuperieur,double cMin,double cMax);
Elle configure une telle projection selon la direction -z en plaçant un plan de clipping vertical gauche en x=xGauche, un plan de clipping vertical
droit en x=xDroit, un plan de clipping horizontal inférieur en y=yInferieur et un plan de clipping horizontal supérieur en y=ySuperieur. Ces quatre
plans de clipping sont mappés sur les bords gauche, droit, inférieur et supérieur du viewport de visualisation. Les valeurs cMin et cMax définissent
les "distances" en z par rapport ŕ l'origine oů sont placés les plans de clipping en profondeur. CMin et cMax peuvent ętre positifs
ou négatifs.
Le volume de visualisation ainsi créé est un parallélépipčde rectangle de diagonale (xGauche,yInferieur,-cMin)-(xDroit,ySuperieur,-cMax) dans lequel
la projection se fait selon l'axe -z.
2a) Le rôle de la fonction gluPerspective est de configurer une caméra virtuelle de visualisation en perspective selon l'axe -z pour un observateur
placé ŕ l'origine. Elle permet de configurer l'angle d'ouverture vertical (fov ci-dessous, valeur en degrés), le ratio par lequel il
faut multiplier l'angle d'ouverture vertical pour obtenir l'angle d'ouverture horizontal (ratio ci-dessous), la distance en z (valeur
positive) en dessous de laquelle les objets ŕ visualiser sont clippés (cMin ci-dessous) et la distance en z (valeur positive) au delŕ de laquelle
les objets ŕ visualiser sont clippés (cMax ci-dessous).
Son prototype est:
void gluPerspective(double fov,double ratio,double cMin,double cMax);
Application numérique : La distance entre le centre de la scčne et la caméra est égale ŕ sqrt((-2.0--4.0)2+(-4.0-6.0)2+(6.0--5.0)2)
= sqrt(4.0+100.0+121.0) = sqrt(225.0) = 15.0. Le rayon de la scéne est de 5.0. L'angle d'ouverture vertical est égal ŕ 2.0*asin(5.0/15.0)
radians converti en degrés en multipliant par 180.0 et divisant par PI. Cette formule peut ętre directement intégrée dans le code. La valeur numérique
est d'environ 39°.
Pour cMin on prend la distance entre le centre de la scčne et la caméra et on retranche le rayon de la scčne. Cela donne 15.0-5.0=10.0. Pour cMax
on prend la distance entre le centre de la scčne et la caméra et on ajoute le rayon de la scčne. Cela donne 15.0+5.0=20.0. On a tout intéręt ŕ ajuster
ces valeurs d'un epsilon négatif pour cMin et positif pour cMax de façon ŕ ętre certain que la scčne n'est pas clippée en z.
2b) La fonction gluLookAt est utilisée pour résoudre le problčme du placement et de l'orientation d'une caméra virtuelle de visualisation
lorsque celle-ci n'est pas placée ŕ l'origine ou n'est pas orientée selon l'axe -z. Son appel est réalisé entre la configuration
de la caméra et la modélisation de la scčne.
Cette fonction prend 9 valeurs double en paramčtre. Les 3 premiers paramčtres représentent la position (cx,cy,cz) de la caméra. Les valeurs ŕ configurer
seront donc (-4.0,6.0,-5.0). Les trois suivants représentent la position (vx,vy,vz) d'un point qui sera projeté au centre du viewport de visualisation.
Il s'agit généralement d'un point situé au centre de la scčne. On utilisera donc les valeurs (-2.0,-4.0,6.0). Enfin, les trois derniers définissent
la direction (dx,dy,dz) qui sera projetée verticalement dans le viewport d'affichage. La verticale étant généralement l'axe y, on configurera
(0.0,1.0,0.0).
2c) L'appel ŕ gluLookAt peut ętre placé dans la fonction display juste avant la modélisation de la scčne ou bien dans la fonction reshape aprčs le glLoadIdentity en mode GL_MODELVIEW.
#ifndef M_PI
#define M_PI 3.14159
#endif
#define EPSILON 1.0
static void reshape(int tx,int ty) {
glViewport(0,0,tx,ty);
glMatrixMode(GL_PROJECTION);
glLoadIdentity();
double ratio =(double) tx/ty;
gluPerspective(2.0*asin(5.0/15.0)*180/M_PI,ratio,10.0-EPSILON,20.0+EPSILON);
glMatrixMode(GL_MODELVIEW);
glLoadIdentity();
gluLookAt(-4.0,6.0,-5.0,-2.0,-4.0,6.0,0.0,1.0,0.0);
}
Solutions
|
GLUT |
||
| Epreuve de TD n°2 |
|
|
![]()
TP n°8 : Coordonnées homogčnes
Le fichier CH3D.h est le fichier de déclaration d'une classe destinée ŕ coder des coordonnées homogčnes. Pour faciliter les opérations matricielles (TD n°5), le choix a été fait de ne pas utiliser en attribut 4 champs réels mais un tableau de 4 réels. Ce tableau est déclaré en public.
a) Développer le fichier CH3D.cpp implantant cette classe.
Le constructeur sans paramčtre crée une position initialisée ŕ l'origine. Le constructeur ŕ 4 paramčtres réels crée des coordonnées homogčnes
initialisées ŕ ces valeurs. Le constructeur ŕ paramčtre unique de type pointeur sur CH3D crée une copie (un clone) de cet objet. La méthode void
print(void) se contentera d'afficher sous forme textuelle sur une męme ligne sans saut de ligne les valeurs des quatre réels contenus dans le
tableau des coordonnées.
b) Développer les fichiers .h et .cpp d'une classe dérivée de CH3D permettant de coder des positions dans un espace ŕ trois dimensions (4čme
coordonnée égale ŕ 1.0 en coordonnées homogčnes). Cette classe sera nommée Pos3D. Elle contiendra les trois constructeurs :
- Pos3D(void),
- Pos3D(double px,double py,double pz),
- Pos3D(Pos3D *p)
et un destructeur.
Le premier constructeur construit une position située ŕ l'origine. Le deuxičme construit la position de coordonnées (px,py,pz). Enfin, le dernier
constructeur construit une copie (un clone) de la position p. Cette classe ne contient aucune méthode ŕ part la méthode print directement héritée
de CH3D.
c) Développer les fichiers .h et .cpp d'une classe dérivée de CH3D permettant de coder des directions dans un espace ŕ trois dimensions(4čme
coordonnée égale ŕ 0.0 en coordonnées homogčnes). Cette classe sera nommée Dir3D. Elle contiendra les quatre constructeurs suivants :
- Dir3D(void),
- Dir3D(double dx,double dy,double dz),
- Dir3D(Dir3D *d),
- Dir3D(Pos3D *pi,Pos3D *pf)
et un destructeur.
Le premier constructeur construit une direction orientée en -z. Le deuxičme constructeur construit la direction de coordonnées (dx,dy,dz). Le troisičme
constructeur construit une copie (un clone) de la direction d. Le quatričme constructeur construit la direction pi vers pf. Cette classe ne contient
aucune méthode ŕ part la méthode print directement héritée de CH3D.
On donne le fichier Mathematiques1.cpp. Ce fichier contient un programme constitué d'une unique fonction void main(void) destinée ŕ valider les développements que vous allez réaliser aux questions (d), (e) et (f). Vous devriez obtenir un affichage voisin de celui donné ci-dessous (valeurs identiques éventuellement formatées de façon différente).
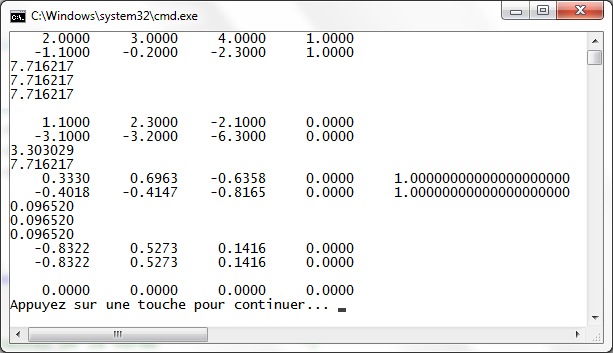
d) Développer une méthode d'instance (méthode "classique") et une méthode de classe (méthode statique) permettant de calculer la distance existant entre une position et une autre position. Les méthodes développées doivent ętre compatibles avec les appels réalisés dans la fonction main du programme Mathematiques1.cpp.
e) Développer une méthode permettant de calculer la norme d'une direction. Développer une méthode permettant de normer une direction.
f) Développer une méthode d'instance et une méthode de classe permettant de calculer le produit scalaire d'une direction par une autre direction.
g) Développer une méthode d'instance et une méthode de classe permettant de calculer le produit vectoriel d'une direction par une autre direction.
Solutions
Si on souhaite disposer d'une classe "Coodonnées Homogčnes" permettant d'utiliser des attributs x, y, z et w de type réel tout aussi bien qu'un attribut c de type tableau de 4 réels avec concordance mémoire entre x et c[0], y et c[1], z et c[2] et w et c[3] (utilisation d'une union), on pourra substituer au fichier CH3D.h cette version de fichier CH3D.h.
Remarque : Dans un but d'efficacité ŕ l'exécution, les solutions proposées ci-dessus ne sont pas programmées en respectant les recommandations usuelles de la programmation orientée objet (protection des attributs, protection des types, méthodes private/protected, ...). On trouvera ci-dessous une implantation respectant ces recommandations.
![]()
TD n°5 : Transformations géométriques
On souhaite implanter les outils informatiques qui nous permettront de réaliser des transformations géométriques.
a) Implanter un classe mčre TG3D permettant de coder des transformations géométriques génériques en coordonnées homogčnes.
On munira TG3D des deux constructeurs :
- TG3D(void),
- TG3D(TG3D *tg)
et d'un destructeur.
Le constructeur sans paramčtre construit l'identité. Le constructeur ŕ paramčtre unique de type pointeur sur TG3D crée une copie (un clone) de
cet objet.
On créera aussi une méthode void print(void) d'affichage texte des composantes.
b) Dériver de la classe TG3D une classe fille Tr3D permettant de coder des transformations géométriques de type translation.
On munira Tr3D des quatre constructeurs :
- Tr3D(void),
- Tr3D(double tx,double ty,double tz),
- Tr3D(Dir3D *d),
- Tr3D(Tr3D *tr)
et d'un destructeur.
Le constructeur sans paramčtre construit l'identité. Le constructeur ŕ 3 paramčtres de type double construit la translation de vecteur (tx,ty,tz).
Le constructeur ŕ paramčtre unique d de type pointeur sur Dir3D construit la translation de vecteur défini par les composantes de d. Le constructeur
ŕ paramčtre unique tr de type pointeur sur Tr3D crée une copie (un clone) de cet objet. Cette classe ne contient aucune méthode ŕ part la méthode
print directement héritée de TG3D.
c) Dériver de la classe TG3D une classe fille Rt3D permettant de coder des transformations géométriques de type rotation.
On munira Rt3D des quatre constructeurs :
- Rt3D(void),
- Rt3D(double alpha,double ax,double ay,double az),
- Rt3D(double alpha,Dir3D *d),
- Rt3D(Rt3D *rt)
et d'un destructeur.
Le constructeur sans paramčtre construit l'identité. Le constructeur ŕ 4 paramčtres de type double construit la rotation d'angle alpha degrés
autour de l'axe (ax,ay,az) passant par l'origine. Le constructeur ŕ paramčtres alpha et d de types respectifs double et pointeur sur Dir3D
construit la rotation d'angle alpha degrés autour de l'axe de direction définie par d et passant par l'origine. Le constructeur ŕ paramčtre
unique rt de type pointeur sur Rt3D crée une copie (un clone) de cet objet. Cette classe ne contient aucune méthode ŕ part la méthode print directement
héritée de TG3D.
d) Dériver de la classe TG3D une classe fille Sc3D permettant de coder des transformations géométriques de type zoom (scale).
On munira Sc3D des trois constructeurs :
- Sc3D(void),
- Sc3D(double rx,double ry,double rz),
- Sc3D(Sc3D *sc)
et d'un destructeur.
Le constructeur sans paramčtre construit l'identité. Le constructeur ŕ 3 paramčtres de type double construit le zoom de rapports (rx,ry,rz).
Le constructeur ŕ paramčtre unique sc de type pointeur sur Sc3D crée une copie (un clone) de cet objet. Cette classe ne contient aucune méthode ŕ
part la méthode print directement héritée de TG3D.
e) On souhaite réaliser la transformation d'une position ou d'une direction codée en coordonnées homogčnes par une transformation géométrique. Implanter une méthode d'instance permettant de réaliser cette opération.
f) On souhaite réaliser la composition de deux transformations géométriques. Implanter une méthode d'instance permettant de réaliser cette opération.
Solutions

Les solutions ci-dessous ont été réalisées avec respect des recommandations usuelles du développement orienté objet :
- protection des types pour éviter la possibilité de faire endosser le comportement lié ŕ une classe par un objet qui n'implante pas cette
classe,
- protection des attributs (attributs private et protected, getters et setters),
- méthodes private et protected,
- non utilisation de fonctionnalités purement liées au langage C :
- union anonymes,
- ...
- ...
| CH3D.h | CH3D.cpp |
| Pos3D.h | Pos3D.cpp |
| Dir3D.h | Dir3D.cpp |
| TG3D.h | TG3D.cpp |
| Tr3D.h | Tr3D.cpp |
| Rt3D.h | Rt3D.cpp |
| Sc3D.h | Sc3D.cpp |
| Mathematiques3.cpp | |
![]()
TD n°6 : Courbes B-Splines
a) On dispose d'un tableau de quatre Pos3D (voir TP n°8). On souhaite déterminer la position, pour une valeur t donnée, d'un point situé sur la courbe B-Spline définie par la ligne polygonale constituée de ces quatre positions.
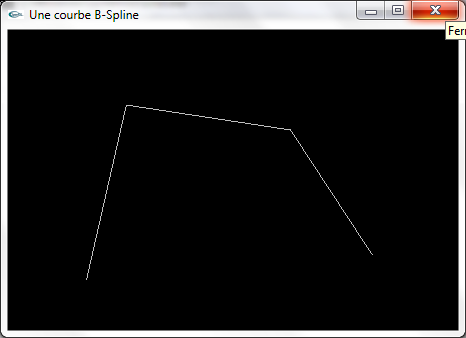
Ligne polygonale
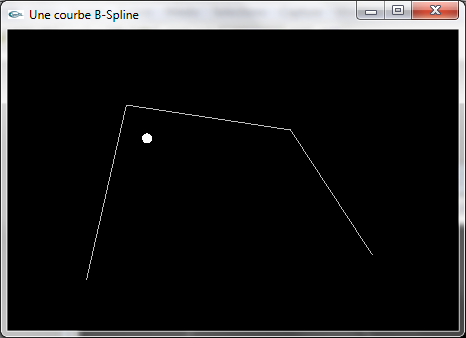
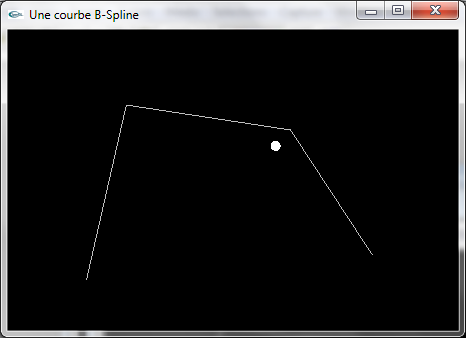
Positions ŕ t = 0.0 et t = 1.0
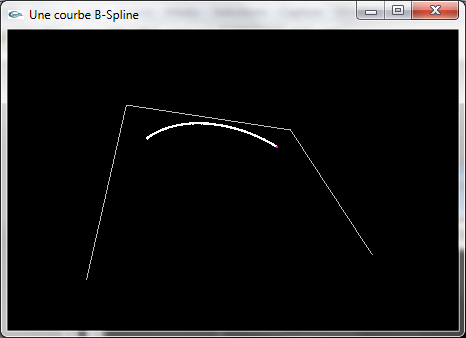
Toutes les positions
Développer une fonction ad hoc prenant en paramčtres le tableau g des quatre Pos3D, la valeur de t (0.0 <= t <= 1.0), la matrice de base mb
utilisée et le pointeur p sur la Pos3D résultat du calcul :
void determinationPositionSurBSpline(Pos3D **g,double t,double mb[4][4],Pos3D *p);
b) On dispose d'un tableau de Pos3D. Le nombre de ces positions est au moins égal ŕ quatre. On souhaite tracer la courbe B-Spline par morceaux
définie par la ligne polygonale constituée de ces positions. Pour ce faire, on souhaite calculer n positions de lissage (n >= 2) uniformément
réparties.
Développer une fonction ad hoc.
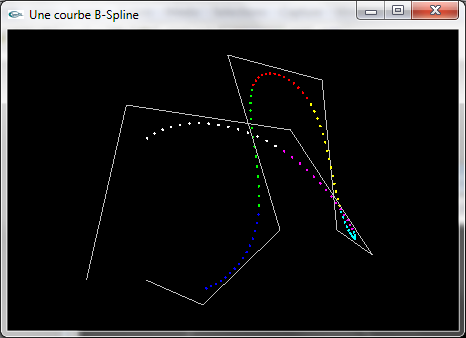
B-Spline par morceaux
Solutions
![]()
Epreuve n°3 : Matériels et lumičres
![]()
TP n°9 : Courbes lissées
On considčre la liste de positions trois dimensions suivante :
( 6.5, 4.9,-3.00), ( 7.0, 5.0,-3.00), ( 7.5, 4.9,-2.00),
( 8.0, 4.6, 0.00), ( 7.5, 4.4, 2.00), ( 7.0, 4.2, 3.50),
( 6.0, 3.8, 4.00), ( 5.0, 2.8, 4.00), ( 4.0, 1.8, 4.00),
( 3.0, 0.8, 4.00), ( 0.0, 0.0, 4.00), (-1.4, 0.7, 3.75),
(-2.0, 2.0, 3.50), (-1.4, 3.3, 3.25), ( 0.0, 4.0, 3.00),
( 1.4, 3.3, 2.75), ( 2.0, 2.0, 2.50), ( 1.0, 0.7, 2.25),
(-1.0, 0.0, 2.00), (-2.4, 0.7, 1.75), (-3.0, 2.0, 1.50),
(-2.4, 3.3, 1.25), (-1.0, 4.0, 1.00), ( 0.4, 3.3, 0.75),
( 1.0, 2.0, 0.50), ( 0.0, 0.7, 0.25), (-2.0, 0.2, 0.00),
(-7.0, 0.0, 1.50), (-8.0, 0.0,-1.30), (-7.0, 0.3,-1.90),
(-6.0, 1.8,-2.40), (-4.5, 4.9,-2.40), (-3.0, 3.2,-2.40),
( 0.5, 2.4,-2.80), ( 3.5, 4.4,-2.80), ( 4.5, 4.7,-2.90),
( 5.5, 4.8,-3.00).
On souhaite dessiner une courbe lissant la ligne polygonale formée par ces 37 positions.
a) Implanter une fonction de lissage par B-Spline par morceaux applicable ŕ un ensemble de points de contrôle, pour une matrice de base particuličre et générant n points répartis uniformément sur la courbe.
Courbe B-Spline par morceaux, matrice de base NRUBS
Mise en évidence des morceaux
Courbe B-Spline par morceaux, matrice de base Catmull-Rom
Mise en évidence des morceaux
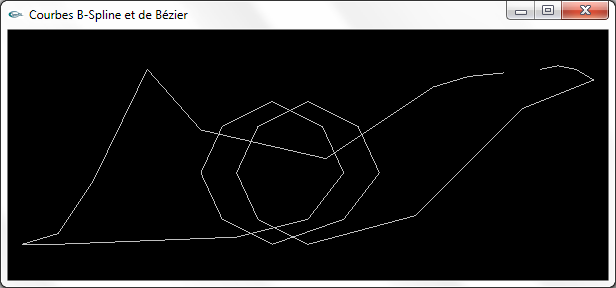
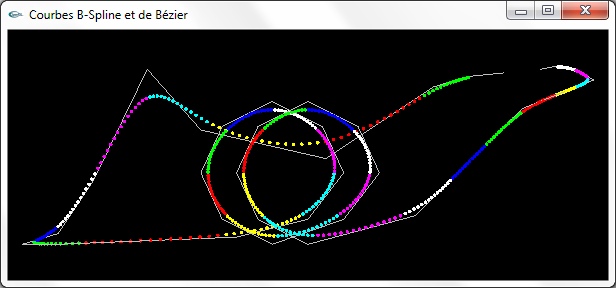
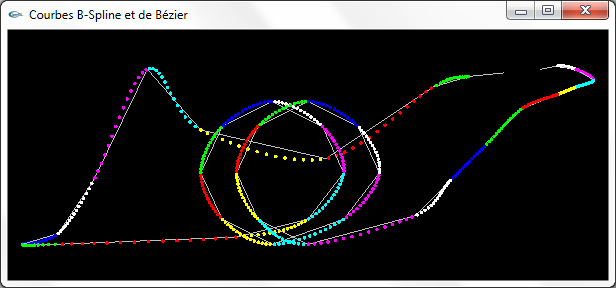
b) Implanter un programme OpenGL complet permettant de dessiner simultanément avec des couleurs différentes:
- la ligne polygonale définie selon les 37 positions ci-dessus,
- la courbe B-Spline par morceaux obtenue en utilisant la matrice de base NRUBS et ces 37 points en tant que points de contrôle,
- la courbe B-Spline par morceaux obtenue en utilisant la matrice de base Catmull-Rom et ces 37 points en tant que points de contrôle.
c) Implanter une fonction de lissage par courbe de Bézier applicable ŕ un ensemble de points de contrôle et générant n points répartis uniformément sur la courbe.
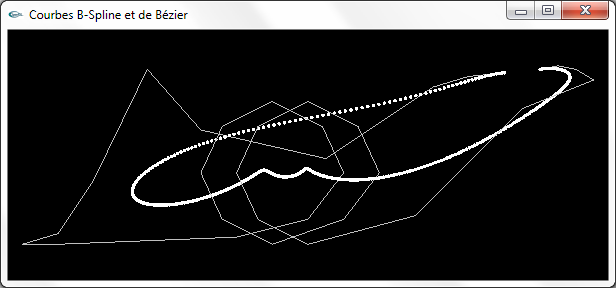
d) Modifier le programme de la question (b) pour dessiner en plus la courbe de Bézier contrôlée par les 37 points.
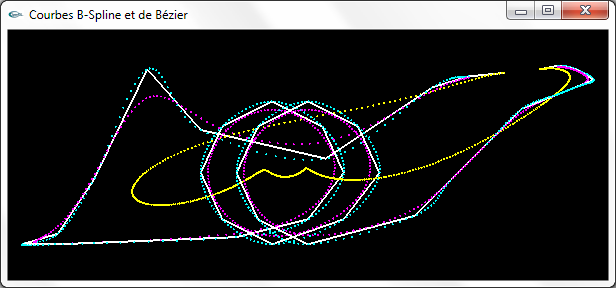
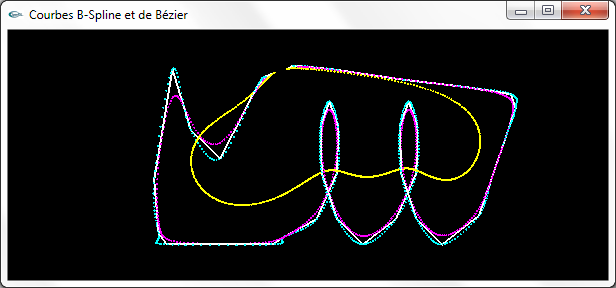
Blanc : Ligne polygonale
Magenta : B-Spline NRUBS
Cyan : B-Spline Catmull-Rom
Jaune : Courbe de Bezier
Solutions
![]()
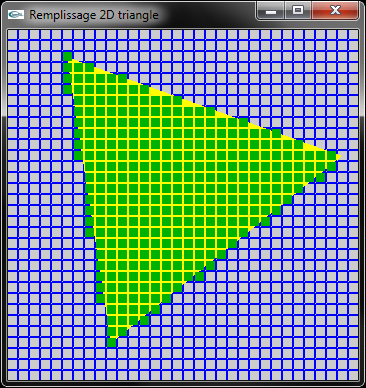
TD n°7 : Remplissage d'une facette triangulaire
Implanter une fonction de remplissage 2D d'un triangle.
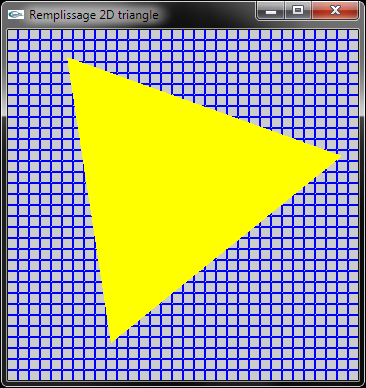
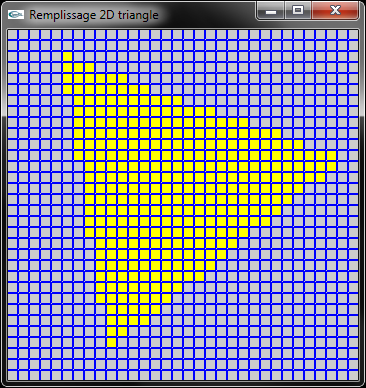
Méthode: Remplir un triangle en 2D peut ętre réalisé en traçant toutes les lignes horizontales de pixels délimitées par ses bords gauche et droit. Il convient donc de déterminer les abscisses extrčmes de ces lignes horizontales pour chacun des y compris entre ymin et ymax oů ymin (resp. ymax) est la valeur minimale (resp. maximale) des ordonnées des 3 sommets de définition du rectangle.
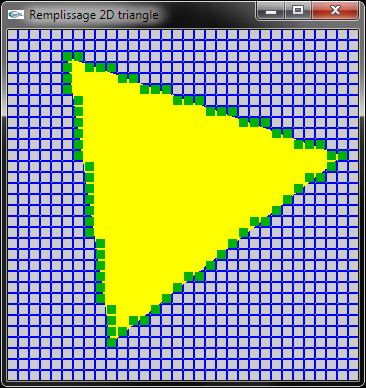
Ainsi, deux tableaux xd et xg sont calculés dont les indices correspondent aux ordonnées y des lignes de pixels.
Le calcul de ces deux tableaux est réalisé par implantation et adaptation de l'algorithme de Bresenham pour le tracé de segments de droite. Cet
algorithme adapté est appliqué aux trois bords du triangle rempli.
Solutions
![]()
TP n°10 : TP Projet
![]()
TP n°11 : Calcul de la direction des rayons réfléchis et transmis dans le cadre d'un algorithme de lancer de rayons
L'implantation d'un algorithme de lancer de rayons nécessite l'implantation d'un certain nombre de fonctions de calcul. Par exemple, pour chaque
type d'objet graphique géré, il sera nécessaire de tester s'il existe une intersection entre un objet graphique de ce type et un rayon. Un autre
exemple de fonctions devant ętre implantées sont les fonctions nécessaires aux calculs d'illumination : diffusion, réflexions spéculaires, ...
Ce TP s'attache au calcul des directions des rayons issus de la décomposition d'un rayon lumineux incident ŕ l'interface entre le milieu incident
et un autre milieu. Ces rayons sont au nombre de deux : les rayons de réflexion et de transmission.
Vous trouverez dans le fichier RayTracing.zip l'ensemble des fichiers sources constitutifs d'un programme permettant d'afficher des scčnes constituées de sphčres en utilisant un algorithme de lancer de rayons. Ces sphčres peuvent ętre diffusantes, transparentes et réfléchissantes. Plus exactement ce programme ouvre deux fenętres. La premičre réalise l'affichage de façon habituelle en utilisant OpenGL. La seconde fenętre permet l'affichage de la męme scčne, mais en utilisant le lancer de rayons. La touche Enter permet de lancer l'affichage en lancer de rayons. La touche Espace permet de changer de scčne. La souris peut ętre utilisée dans la fenętre OpenGL pour faire tourner la scčne sur elle-męme. Il est alors possible de relancer le calcul en lancer de rayons.
a) Télécharger le fichier RayTracing.zip. Réaliser l'extraction de l'ensemble des fichiers qu'il contient. Intégrer ces fichiers ŕ un projet de développement permettant la compilation en utilisant OpenGL et GLUt. Compiler le projet. La compilation n'aboutit pas car deux méthodes ont été supprimées : une premičre pour calculer la direction du rayon réfléchi, une deuxičme pour calculer la direction du rayon transmis.
b) Déterminer la classe dans laquelle ces méthodes manquent et leurs entętes.
c) Développer ces deux méthodes pour obtenir un programme fonctionnel. Vous vous reporterez au cours sur le lancer de rayons pour trouver les formules de calcul.
![]()
Hiérarchie de classes
| Vecteur4 | CoordonneesHomogenes3D | Position3D | ||||
| Dimension3D | ||||||
| Matrice4x4 | TransformationGeometrique3D | Translation3D | ||||
| MatriceDeBase | Rotation3D | |||||
| Scale3D | ||||||
| LookAt | ||||||
| Rvb | Couleur | |||||
| Energie | ||||||
| Lumiere | LumierePonctuelle | LumiereSpot | ||||
| LumiereDirectionnelle | ||||||
| Materiel | ||||||
| Objet | Sphere | |||||
![]()